
สารบัญ:
- ผู้เขียน John Day day@howwhatproduce.com.
- Public 2024-01-30 13:05.
- แก้ไขล่าสุด 2025-01-23 15:12.

ก่อนหน้านี้ฉันโพสต์ตัวควบคุม Wifi PPM ของฉัน มันทำงานได้ดีทีเดียว แค่ช่วงสั้นไปหน่อย ฉันพบวิธีแก้ไขปัญหานี้ ESP8266 รองรับโหมดที่เรียกว่า ESPNOW โหมดนี้มีระดับที่ต่ำกว่ามาก การเชื่อมต่อไม่หลุดง่ายนัก และหากขาดการเชื่อมต่อ จะทำการเชื่อมต่อใหม่ทันที
ฉันใช้สาม ESP8266 หนึ่งคือตัวรับ ESPNOW อีกตัวหนึ่งคือผู้ส่ง ESPNOW และตัวที่สามคือจุดเชื่อมต่อที่คุณสามารถเชื่อมต่อได้ จำเป็นต้องใช้อันที่สามเนื่องจากผู้ส่ง ESPNOW ไม่สามารถเป็นจุดเชื่อมต่อได้ในเวลาเดียวกัน ฉันยังเพิ่มเสาอากาศบางส่วนเพื่อให้ได้ช่วงที่ดีขึ้น
มีจุดเชื่อมต่อที่สองที่เครื่องรับโดยตรง หากคุณเชื่อมต่อกับสิ่งนี้ แสดงว่าคุณมีแบบเดียวกันกับโครงการ WifiPPM แบบเก่า
ฉันยังเพิ่มการรองรับสำหรับตัวรับโปรโตคอล MSP นี่คือ "MultiWii Serial Protocol" ซึ่งรองรับโดย MultiWii, Betaflight, Cleanflight และตัวควบคุมการบินอื่น ๆ อีกมากมาย
ขั้นตอนที่ 1: รายการชิ้นส่วน




คุณต้องการโมดูล ESP8266 สามโมดูลชนิดใดก็ได้ แต่คุณต้องการช่วงที่ดีที่สุด ดังนั้นฉันจึงแนะนำให้ใช้โมดูล ESP8266 กับเสาอากาศ มันยังทำงานโดยไม่มีเสาอากาศ ฉันใช้ส่วนต่อไปนี้:
2 x ESP07 (โมดูล ESP8266 พร้อมขั้วต่อเสาอากาศ)
1 x ESP12
1 x 3dBi เสาอากาศขนาดเล็ก I-PEX U. FL IPX ที่ฝั่งตัวรับ
1 x ESP8266 2, 4/5 GHz 3dbi Wlan Wifi Antenne SMA Stecker / ชาย + อะแดปเตอร์ I-PEX ที่ด้านผู้ส่ง
แหล่งจ่ายไฟ 3, 3 V สำหรับโมดูล ESP8266 ทั้งหมด
คุณต้องมีพีซีที่มี Arduino IDE: https://www.arduino.cc/en/Main/SoftwareESP8266 รองรับ Arduino IDE ทำตามคำแนะนำเหล่านี้: https://learn.sparkfun.com/tutorials/esp8266-thin…ไลบรารี Websocket สำหรับ Arduino:
ขั้นตอนที่ 2: ดาวน์โหลดและแฟลช Sketches



คุณสามารถดาวน์โหลดภาพร่างได้ที่นี่
แตกไฟล์. มีสามโฟลเดอร์: Master-AP, ผู้ส่ง, ผู้รับ
Master-AP: เป็นภาพร่างสำหรับจุดเชื่อมต่อ เปิดภาพร่างด้วย arduino IDE ตั้งค่าความถี่ CPU เป็น 160 MHz ในเมนูเครื่องมือและอัปโหลดภาพร่างไปที่ ESP12
ผู้ส่ง: นั่นคือภาพร่างสำหรับผู้ส่ง MSPNOW ตั้งค่าความถี่ CPU เป็น 160 MHz และอัปโหลดไปยัง ESP07 ตัวใดตัวหนึ่ง
คุณสามารถเห็นภาพแรกวิธีเชื่อมต่อโมดูล ESP8266 สำหรับการกะพริบ
ตอนนี้เชื่อมต่อ ESP12 (จุดเชื่อมต่อ) และพอร์ตอนุกรมของผู้ส่ง ESP07 และการเชื่อมต่อพลังงาน (ภาพที่สอง): ESP12 VCC -> ESP07 VCCESP12 GND -> ESP07 GNDESP12 TX -> ESP07 RXESP12 RX -> ESP07 TX
เริ่มโมดูลทั้งสองและเชื่อมต่อกับจุดเชื่อมต่อ "Long-Range-WifiPPM/MSP" รหัสผ่านคือ "WifiPPM/MSP"
เปิดเบราว์เซอร์และเปิดที่อยู่ IP 192.168.4.1 เว็บไซต์ควบคุมจะปรากฏขึ้น คลิกที่ปุ่ม "ข้อมูล WiFi" กล่องข้อความที่มี MAC ผู้ส่งและ MAC ผู้รับจะปรากฏขึ้น
เปิดร่างตัวรับใน Arduino IDE เปลี่ยนบรรทัด "uint8_t sendermac = {0x5C, 0xCF, 0x7F, 0x77, 0xAB, 0xA6};" (ภาพที่สาม) ไปยังที่อยู่ Mac ของผู้ส่งซึ่งแสดงอยู่ที่เว็บไซต์ เครื่องรับ Mac ควรจะโอเค ตรวจสอบให้แน่ใจว่าความถี่ของ CPU ตั้งไว้ที่ 160 MHz และอัปโหลดภาพร่างไปยัง ESP05 ตัวที่สอง
ขั้นตอนที่ 3: เชื่อมต่อเครื่องรับกับตัวควบคุมเที่ยวบินและตั้งค่า Cleanflight



เชื่อมต่อเครื่องรับกับตัวควบคุมการบิน ผู้ควบคุมการบินของคุณควรมีเอาต์พุต 3, 3 โวลต์ที่มีอย่างน้อย 200 mA หากคุณไม่ต้องการตัวควบคุมแรงดันไฟฟ้า 3, 3V เพิ่มเติม
เชื่อมต่อ GND ของ ESP กับ GND ของตัวควบคุมการบิน เชื่อมต่อ VCC ของ ESP กับ 3, 3V ของตัวควบคุมการบินหรือกับตัวควบคุมแรงดันไฟฟ้า 3, 3V เพิ่มเติม
คุณสามารถใช้เอาต์พุต PPM หรือเอาต์พุต MSP แบบอนุกรม
สำหรับเอาต์พุต MSP ให้เชื่อมต่อ TX ของ ESP8266 กับ RX ของพอร์ตอนุกรมใดๆ ของตัวควบคุมการบินของคุณ (ภาพที่ 1)
สำหรับเอาต์พุต PPM ให้เชื่อมต่อ GPIO5 ของ ESP8266 กับอินพุต PPM ของตัวควบคุมการบิน (ภาพที่ 1)
หลังจากเดินสาย ESP แล้ว ให้เริ่มตัวควบคุมการบินและเปิด Cleanflight เชื่อมต่อกับโทรศัพท์มือถือของคุณไปยังจุดเข้าใช้งาน "WifiPPM/MSP" รหัสผ่านคือ "WifiPPM/MSP"
สำหรับ MSP: เปิดแท็บพอร์ตและตั้งค่า MSP ที่พอร์ตอนุกรมที่คุณเชื่อมต่อ ESP8266 (ภาพที่ 2) บันทึกและรีสตาร์ทไปที่แท็บการกำหนดค่าและตั้งค่าเครื่องรับเป็น "ตัวรับสัญญาณอนุกรม MSP" (ภาพที่ 3) บันทึกและเริ่มต้นใหม่
สำหรับ PPM: อ่านในคู่มือของผู้ควบคุมการบินของคุณเกี่ยวกับวิธีตั้งค่า PPMGo ไปยังแท็บการกำหนดค่าและตั้งค่าเครื่องรับเป็น "เครื่องรับ PPM" (ภาพที่ 4) บันทึกและเริ่มต้นใหม่
การตั้งค่าถัดไปสำหรับผู้รับทั้งสองเหมือนกัน:ไปที่แท็บตัวรับ ตั้งค่าช่องเป็น "RTAE1234" (ภาพที่ 5/วิดีโอ) บันทึกการตั้งค่า
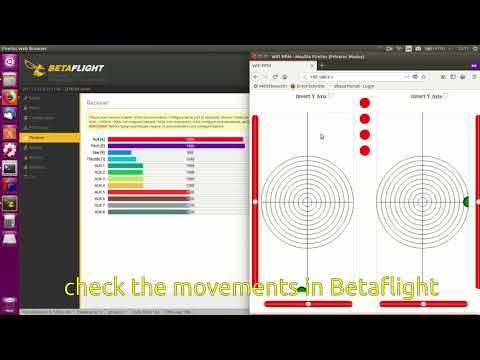
ตอนนี้เปิดเบราว์เซอร์ที่สมาร์ทโฟนของคุณ เปิดเว็บไซต์ 192.168.4.1 (รูปที่ 6) ตอนนี้คุณสามารถตรวจสอบคอนโทรลเลอร์ได้
ถ้ามันใช้งานได้ ให้เริ่มตัวส่งสองตัวคือ ESP8266 เชื่อมต่อกับจุดเข้าใช้งาน "Long Range WifiPPM/MSP" รหัสผ่านคือ "WifiPPM/MSP" เปิดเว็บไซต์อีกครั้ง 192.168.4.1 ตรวจสอบอีกครั้งใน cleanflight ว่าใช้งานได้หรือไม่
เชื่อมต่อเสาอากาศเข้ากับโมดูล ESP07
ขั้นตอนที่ 4: ข้อมูลเพิ่มเติมบางอย่าง

มีจุดเข้าใช้งานสองจุดในการทำงานปกติ จุดเชื่อมต่อ "WifiPPM/MSP" เหมือนกับโครงการ WifiPPM ก่อนหน้า คุณสามารถใช้ได้หากต้องการบินอย่างรวดเร็วโดยไม่ต้องเชื่อมต่อโมดูลเพิ่มเติม เมื่อไม่ต้องการการเชื่อมต่อระยะไกล หากคุณเชื่อมต่อกับ "Long Range WifiPPM/MSP" ตัวควบคุมระยะไกลจะเข้าควบคุม
บางทีคุณอาจต้องการทราบว่า "ระยะยาว" นานแค่ไหน จริงๆแล้วฉันไม่รู้เลย อย่างน้อยก็ไม่กี่ร้อยเมตร แต่ฉันไม่สามารถทดสอบได้จนถึงขณะนี้ มันไม่หลุดการเชื่อมต่อในแฟลตของฉัน
ฉันเพิ่มการควบคุม MSP เพราะฉันคิดว่าฉันสามารถสร้างช่องทางด้านหลังสำหรับข้อมูลทางไกลได้ แต่นั่นก็ไม่เคยได้ผลอย่างมั่นคง อย่างไรก็ตาม โปรโตคอล MSP มีความแม่นยำมากกว่า ppm เพราะไม่ได้ขึ้นอยู่กับเวลามากนัก บางทีมันอาจสร้างปัญหากับตัวควบคุมการบินที่ช้า เนื่องจากมีทราฟฟิกหนาแน่นบนพอร์ตอนุกรม ด้วยตัวควบคุมการบิน Noxe F4 ของฉัน มันทำงานได้โดยไม่มีปัญหา
หากคุณมีปัญหาการกำหนดค่าให้ดูที่โครงการ WifiPPM เก่า
แนะนำ:
เครื่องจุดพลุ Bluetooth ระยะไกล: 6 ขั้นตอน (พร้อมรูปภาพ)
")
รีโมท Bluetooth Firework Igniter: จุดพลุมากกว่าหนึ่งจุดพร้อมกันจะดีไหม หรือแม้แต่มีระยะห่างที่ปลอดภัยเพื่อไปยังวัตถุระเบิดที่อันตรายกว่า ในโครงการนี้ ฉันจะแสดงวิธีสร้างวงจรที่สามารถทำได้ด้วยความช่วยเหลือของฟังก์ชัน Bluetooth
Node-RED พร้อมเซ็นเซอร์ตรวจจับการสั่นสะเทือนและอุณหภูมิ IoT ระยะไกล: 34 ขั้นตอน

Node-RED พร้อมเซ็นเซอร์ตรวจจับการสั่นสะเทือนและอุณหภูมิระยะไกล IoT: ขอแนะนำเซ็นเซอร์ความชื้นอุณหภูมิแบบไร้สายระยะไกลของ NCD ที่มีระยะสูงสุด 28 ไมล์โดยใช้สถาปัตยกรรมเครือข่ายตาข่ายไร้สาย การรวมเซ็นเซอร์ความชื้นอุณหภูมิ Honeywell HIH9130 ส่งอุณหภูมิที่มีความแม่นยำสูงและ
เซ็นเซอร์ระยะใกล้ IR ระยะไกล: 3 ขั้นตอน

Long Range IR Proximity Sensor: เซ็นเซอร์อินฟราเรดเป็นโมดูลที่ดีที่สุดสำหรับการตรวจจับวัตถุ แต่ปัญหาคือใช้งานได้ในระยะที่สั้นมาก ในบทความนี้ เราจะมาแชร์วิธีที่คุณสามารถเพิ่มช่วงและปัจจัยที่ส่งผลต่อช่วง
ระยะไกล 1.8 กม. Arduino กับ Arduino การสื่อสารไร้สายด้วย HC-12: 6 ขั้นตอน (พร้อมรูปภาพ)
")
ระยะไกล 1.8 กม. การสื่อสารไร้สาย Arduino ไปยัง Arduino ด้วย HC-12: ในคำแนะนำนี้ คุณจะได้เรียนรู้วิธีสื่อสารระหว่าง Arduinos ในระยะไกลได้ถึง 1.8 กม. ในที่โล่ง HC-12 เป็นพอร์ตอนุกรมไร้สาย โมดูลการสื่อสารที่มีประโยชน์มาก ทรงพลังอย่างยิ่ง และใช้งานง่าย ก่อนอื่นคุณจะเล
เครื่องกรองสัญญาณ Wifi (WokFi) ระยะไกล: 3 ขั้นตอน (พร้อมรูปภาพ)
 ระยะไกล: 3 ขั้นตอน (พร้อมรูปภาพ)")
เครื่องกรองสัญญาณ Wifi (WokFi) ทางไกล: ในคำแนะนำนี้ ฉันสร้าง Thumbdrive WiFi ทั่วไปลงในตัวขยายสัญญาณ wifi ที่หนักหน่วง! 'ตัวกรองการปรุงอาหารเอเชีย (เกี๊ยว) แบบพาราโบลาเป็นตัวเลือกที่สมบูรณ์แบบสำหรับโครงการนี้ ฉันสามารถรับการเข้าถึงได้อีก 20 รายการ จุดในเมืองและเชื่อมต่อกับเครือข่าย