")
สารบัญ:
- ขั้นตอนที่ 1: ดูโปรเจ็กต์ของฉันทำงาน
- ขั้นตอนที่ 2: รับวัสดุทั้งหมด
- ขั้นตอนที่ 3: อัปโหลดโปรแกรมไปยังบอร์ด Arduino
- ขั้นตอนที่ 4: วางแทร็กและสร้างเลย์เอาต์
- ขั้นตอนที่ 5: แผนผังวงจรมีประโยชน์เสมอ
- ขั้นตอนที่ 6: เชื่อมต่อ Turnouts กับเอาท์พุตของ L298N Driver Board
- ขั้นตอนที่ 7: เชื่อมต่อ Power Feeder Track กับเอาต์พุตอื่นของ L298N Driver Board
- ขั้นตอนที่ 8: เชื่อมต่อ L298N Driver Board เข้ากับ Power Pins ของ Arduino Board
- ขั้นตอนที่ 9: เชื่อมต่อเซ็นเซอร์กับบอร์ด Arduino
- ขั้นตอนที่ 10: เชื่อมต่อพินอินพุตของไดรเวอร์มอเตอร์กับบอร์ด Arduino
- ขั้นตอนที่ 11: วางรถไฟบนรางรถไฟ
- ขั้นตอนที่ 12: เปิดเครื่อง Setup
- ขั้นตอนที่ 13: เสร็จแล้ว
- ผู้เขียน John Day day@howwhatproduce.com.
- Public 2024-01-30 13:03.
- แก้ไขล่าสุด 2025-01-23 15:12.

การสร้างเลย์เอาต์โมเดลรถไฟเป็นงานอดิเรกที่ยอดเยี่ยม การทำให้เป็นอัตโนมัติจะทำให้ดีขึ้นมาก! ให้เราดูข้อดีบางประการของระบบอัตโนมัติ:
- การดำเนินงานต้นทุนต่ำ: โครงร่างทั้งหมดถูกควบคุมโดยไมโครคอนโทรลเลอร์ Arduino โดยใช้ไดรเวอร์มอเตอร์ L298N ค่าใช้จ่ายแทบไม่มีเลยเมื่อเทียบกับการควบคุมคันเร่งแบบเดิมและชุดจ่ายไฟ
- เหมาะที่จะนำไปจัดแสดง: เนื่องจากไม่จำเป็นต้องมีการรบกวนจากมนุษย์เพื่อควบคุมการจัดวาง คุณจึงสามารถใช้ที่หน้าจอที่คุณไม่สามารถควบคุมรถไฟและขบวนรถได้ตลอดเวลา
- เหมาะสำหรับผู้ที่ชื่นชอบไมโครคอนโทรลเลอร์: หากคุณเป็นหรือต้องการเริ่มต้นกับ Arduino และการเขียนโปรแกรม นี่เป็นโครงการที่ยอดเยี่ยมสำหรับคุณในการฝึกฝนทักษะของคุณ
หากคุณสนใจ คุณสามารถตรวจสอบเวอร์ชันก่อนหน้าของโปรเจ็กต์นี้ซึ่งง่ายยิ่งขึ้นไปอีก
ดังนั้นโดยไม่ต้องกังวลใจต่อไป มาเริ่มกันเลย!
ขั้นตอนที่ 1: ดูโปรเจ็กต์ของฉันทำงาน


ขั้นตอนที่ 2: รับวัสดุทั้งหมด

ในการเริ่มต้น ตรวจสอบให้แน่ใจว่าคุณมีสิ่งต่อไปนี้ทั้งหมด:
- แนะนำให้ใช้บอร์ดไมโครคอนโทรลเลอร์ Arduino, UNO
- บอร์ดไดรเวอร์มอเตอร์บริดจ์คู่ L298N
- สายจัมเปอร์ชายกับชาย 6 เส้น
- สายจัมเปอร์ชายกับหญิง 7 เส้น
- ไขควง
- อะแดปเตอร์จ่ายไฟ DC 12 โวลต์
- ส่วนแทร็กที่มีเซ็นเซอร์ความใกล้ชิด IR ติดอยู่ด้านล่าง (ฉันใช้แทร็ก Kato S62)
ขั้นตอนที่ 3: อัปโหลดโปรแกรมไปยังบอร์ด Arduino
ดาวน์โหลด Arduino IDE จากที่นี่ หากคุณไม่มีในคอมพิวเตอร์ จากนั้นดาวน์โหลดและเปิดไฟล์ที่กำหนด
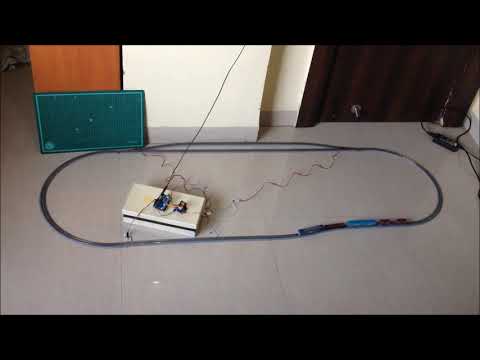
ขั้นตอนที่ 4: วางแทร็กและสร้างเลย์เอาต์

ทำวงรีวงรีด้วยด้านที่ผ่านบ้างดังที่แสดงไว้ด้านบน ตรวจสอบให้แน่ใจว่าระยะห่างระหว่างรางเซนเซอร์กับรางแรกที่รถไฟจะข้ามหลังจากข้ามรางเซนเซอร์นั้นมากกว่าความยาวของรถไฟ เพื่อไม่ให้ส่วนใดของรถไฟอยู่เหนือรางเซนเซอร์เมื่อข้ามรางรถไฟ
ขั้นตอนที่ 5: แผนผังวงจรมีประโยชน์เสมอ

คลิกที่ภาพเพื่อดูแบบเต็ม ตรวจสอบให้แน่ใจว่าคุณได้อ่านแผนผังวงจรทั้งหมดและรายละเอียดทั้งหมดก่อนดำเนินการต่อ
ขั้นตอนที่ 6: เชื่อมต่อ Turnouts กับเอาท์พุตของ L298N Driver Board




ต่อสายสีแดงและสีดำของสินค้าทั้งสองตามลำดับ ส่งผลให้เกิดการเชื่อมต่อแบบขนาน จากนั้นเชื่อมต่อสายสีแดงเข้ากับ out4 และสายสีดำเข้ากับขั้วต่อ out3 ของบอร์ดควบคุมมอเตอร์
ขั้นตอนที่ 7: เชื่อมต่อ Power Feeder Track กับเอาต์พุตอื่นของ L298N Driver Board


เชื่อมต่อสายสีขาวของตัวป้อนพลังงานเข้ากับ out1 และสายสีน้ำเงินเข้ากับขั้ว out2 ของบอร์ดควบคุมมอเตอร์
ขั้นตอนที่ 8: เชื่อมต่อ L298N Driver Board เข้ากับ Power Pins ของ Arduino Board

เชื่อมต่อพิน 12 โวลต์เข้ากับพิน VIN ของบอร์ด Arduino, พิน GND กับพิน GND ของบอร์ด Arduino และควรใช้พิน 5 โวลต์ของไดรเวอร์มอเตอร์กับพิน 5 โวลต์ของบอร์ด Arduino
ขั้นตอนที่ 9: เชื่อมต่อเซ็นเซอร์กับบอร์ด Arduino

เชื่อมต่อพิน VCC ของเซ็นเซอร์กับพิน 5 โวลต์ของบอร์ด Arduino, พิน GND กับพิน GND ของบอร์ด Arduino และพิน OUT กับพิน A0 ของบอร์ด Arduino
ขั้นตอนที่ 10: เชื่อมต่อพินอินพุตของไดรเวอร์มอเตอร์กับบอร์ด Arduino

เชื่อมต่อพินดิจิตอลของบอร์ด Arduino เข้ากับพินอินพุตของบอร์ดควบคุมมอเตอร์ดังนี้:
- D9 ถึง IN1
- D10 ถึง IN2
- D11 ถึง IN3
- D12 ถึง IN4
ขั้นตอนที่ 11: วางรถไฟบนรางรถไฟ

หลังจากตรวจสอบการต่อสายไฟทั้งหมดแล้ว ให้วางรถไฟไว้บนราง
ขั้นตอนที่ 12: เปิดเครื่อง Setup

เพิ่มพลังให้กับการติดตั้งและตรวจดูให้แน่ใจว่าได้เปลี่ยนผลิตภัณฑ์เป็นรางด้านข้าง หากไม่ใช่ ให้ย้อนกลับการเชื่อมต่อของผลิตภัณฑ์ที่ผลิตกับตัวขับมอเตอร์ ตรวจสอบให้แน่ใจว่ารถไฟเริ่มเคลื่อนไปข้างหน้า ย้อนกลับการเชื่อมต่อของรางป้อนกับตัวขับมอเตอร์หากรถไฟเคลื่อนที่ไปในทิศทางที่ไม่ถูกต้อง
ขั้นตอนที่ 13: เสร็จแล้ว
โครงการเสร็จสมบูรณ์สำหรับตอนนี้ คุณสามารถปรับแต่งโค้ด Arduino เพื่อเปลี่ยนการทำงานของเลย์เอาต์ เพิ่มการเข้าข้าง ปรับแต่งได้ทั้งหมด! ฉันชอบที่จะทราบเกี่ยวกับการปรับเปลี่ยนใด ๆ ที่คุณทำกับโครงการนี้ แจ้งให้เราทราบในความคิดเห็นด้านล่าง ดีที่สุด!
แนะนำ:
DIY 37 Leds เกมรูเล็ต Arduino: 3 ขั้นตอน (พร้อมรูปภาพ)
")
DIY 37 Leds เกมรูเล็ต Arduino: รูเล็ตเป็นเกมคาสิโนที่ตั้งชื่อตามคำภาษาฝรั่งเศสหมายถึงวงล้อเล็ก
หมวกนิรภัย Covid ส่วนที่ 1: บทนำสู่ Tinkercad Circuits!: 20 ขั้นตอน (พร้อมรูปภาพ)
")
Covid Safety Helmet ตอนที่ 1: บทนำสู่ Tinkercad Circuits!: สวัสดีเพื่อน ๆ ในชุดสองตอนนี้ เราจะเรียนรู้วิธีใช้วงจรของ Tinkercad - เครื่องมือที่สนุก ทรงพลัง และให้ความรู้สำหรับการเรียนรู้เกี่ยวกับวิธีการทำงานของวงจร! หนึ่งในวิธีที่ดีที่สุดในการเรียนรู้คือการทำ ดังนั้น อันดับแรก เราจะออกแบบโครงการของเราเอง: th
Bolt - DIY Wireless Charging Night Clock (6 ขั้นตอน): 6 ขั้นตอน (พร้อมรูปภาพ)
: 6 ขั้นตอน (พร้อมรูปภาพ)")
Bolt - DIY Wireless Charging Night Clock (6 ขั้นตอน): การชาร์จแบบเหนี่ยวนำ (เรียกอีกอย่างว่าการชาร์จแบบไร้สายหรือการชาร์จแบบไร้สาย) เป็นการถ่ายโอนพลังงานแบบไร้สาย ใช้การเหนี่ยวนำแม่เหล็กไฟฟ้าเพื่อจ่ายกระแสไฟฟ้าให้กับอุปกรณ์พกพา แอปพลิเคชั่นที่พบบ่อยที่สุดคือ Qi Wireless Charging st
4 ขั้นตอน Digital Sequencer: 19 ขั้นตอน (พร้อมรูปภาพ)
")
4 ขั้นตอน Digital Sequencer: CPE 133, Cal Poly San Luis Obispo ผู้สร้างโปรเจ็กต์: Jayson Johnston และ Bjorn Nelson ในอุตสาหกรรมเพลงในปัจจุบัน ซึ่งเป็นหนึ่งใน “instruments” เป็นเครื่องสังเคราะห์เสียงดิจิตอล ดนตรีทุกประเภท ตั้งแต่ฮิปฮอป ป๊อป และอีฟ
ป้ายโฆษณาแบบพกพาราคาถูกเพียง 10 ขั้นตอน!!: 13 ขั้นตอน (พร้อมรูปภาพ)
")
ป้ายโฆษณาแบบพกพาราคาถูกเพียง 10 ขั้นตอน!!: ทำป้ายโฆษณาแบบพกพาราคาถูกด้วยตัวเอง ด้วยป้ายนี้ คุณสามารถแสดงข้อความหรือโลโก้ของคุณได้ทุกที่ทั่วทั้งเมือง คำแนะนำนี้เป็นการตอบสนองต่อ/ปรับปรุง/เปลี่ยนแปลงของ: https://www.instructables.com/id/Low-Cost-Illuminated-