")
สารบัญ:
- ผู้เขียน John Day day@howwhatproduce.com.
- Public 2024-01-30 13:04.
- แก้ไขล่าสุด 2025-01-23 15:12.




แรงจูงใจ
ฉันชอบการแสดง POV (การคงอยู่ของการมองเห็น) มาก! พวกเขาไม่เพียงแค่ดูน่าสนใจเท่านั้น แต่ยังเป็นความท้าทายที่ยิ่งใหญ่ในการพัฒนาพวกเขา เป็นงานสหวิทยาการจริงๆ คุณต้องมีทักษะมากมาย: เครื่องกล อิเล็กทรอนิกส์ การเขียนโปรแกรม และอื่นๆ!
ฉันต้องการสร้างมันขึ้นมาเองและทำให้มันใหญ่และมีความสามารถมากที่สุด ปีที่แล้วฉันทำได้! มันเป็นงานมากและซับซ้อนมากที่จะทำ ฉันชอบความท้าทายประเภทนี้ มันสนุก;-)
ตอนนี้ฉันยังต้องการให้คุณสร้างมันขึ้นมาเอง คุณสามารถใช้สิ่งนี้เป็นแนวทางในการพัฒนาของคุณเองหรือเพียงแค่ทำตามคำแนะนำเพื่อรับสำเนาของจอแสดงผล POV ของฉัน ฉันจะพยายามชี้ให้เห็นความท้าทายทั้งหมดที่ฉันต้องเอาชนะเพื่อสร้างของฉัน
ฉันทำซ้ำในการออกแบบของฉันเพื่อให้สร้างใหม่ได้ง่ายที่สุด ไม่มีส่วนประกอบ SMT และทุกอย่างควรบัดกรีโดยผู้เริ่มต้น อย่าเข้าใจฉันผิด ยังคงเป็นความท้าทายที่ยิ่งใหญ่ในการรวบรวมทุกอย่างเข้าด้วยกัน แต่มันควรจะเป็นไปได้!
คำเตือน: โปรเจ็กต์นี้มีไฟ LED ซึ่งได้รับการอัปเดตด้วยความเร็วสูงและอาจทำให้เกิดอาการชักสำหรับผู้ที่เป็นโรคลมบ้าหมูจากแสงได้
มันทำงานอย่างไร?
คุณสามารถอ่านวิธีการทำงานของจอแสดงผล POV โดยทั่วไปได้ที่นี่
อันดับแรก เราต้องการแหล่งสัญญาณที่สตรีมสัญญาณวิดีโอ ในการออกแบบดั้งเดิม ฉันทำมันผ่าน WIFI ฉันเขียนโปรแกรมจับภาพหน้าจอคอมพิวเตอร์และส่งข้อมูลนี้ไปยัง ESP8266 ผ่าน WIFI ปัญหาของวิธีนี้คือ ESP8266 ช้าเกินไปและแบนด์วิดท์ WIFI ก็เพียงพอสำหรับ 16 FPS ตอนนี้เราใช้ ESP32 ฉันคิดว่าปัญหาทั้งหมดได้รับการแก้ไขแล้ว แต่กลับกลายเป็นว่า ESP32 ยังไม่มีแบนด์วิดท์ผ่าน WIFI มากกว่า ESP8266 ESP32 มีพลังในการคำนวณมากพอที่จะถอดรหัสสตรีมวิดีโอได้ ดังนั้นฉันจึงส่งภาพ JPEG ผ่าน WIFI ไปยัง ESP32 ดังนั้น ESP32 จึงโฮสต์เว็บไซต์ ในไซต์นี้ คุณสามารถเลือกรูปภาพหรือวิดีโอ จากนั้นเว็บไซต์จะสตรีม JPEG ไปยัง ESP32 การถอดรหัส JPEG ต้องการหน่วยความจำจำนวนมาก ดังนั้นเราจึงมีปัญหาที่นั่นเช่นกัน แต่มันใช้งานได้ในขณะนี้ บางทีฉันอาจจะคิดวิธีแก้ปัญหาที่ดีกว่าในภายหลัง
ต่อไปเราต้องควบคุมไฟ LED ด้วยตัวเอง เพื่อให้ใช้งานได้ เราจำเป็นต้องทราบตำแหน่งที่แน่นอนของ LED ทุกขณะ ดังนั้นฉันจึงเพิ่มเซ็นเซอร์เอฟเฟกต์ฮอลล์ การหมุนทุกครั้งจะส่งผ่านแม่เหล็กและทำให้สามารถตรวจจับได้ จากนั้นเราวัดเวลาในการหมุน เราคิดว่าการหมุนครั้งต่อไปจะใช้เวลาเท่ากัน ดังนั้นเราจึงสามารถคำนวณตำแหน่งของเราได้ กระบวนการนี้ซ้ำแล้วซ้ำอีก ในการควบคุม LED เราใช้ FPGA เราสามารถใช้ไมโครโปรเซสเซอร์ได้ แต่มันอาจจะช้าเกินไป ไฟ LED ภายนอกส่วนใหญ่ต้องได้รับการรีเฟรชประมาณ 10.000 ครั้งต่อวินาที FPGA นั้นขึ้นอยู่กับงานอย่างง่ายดายและจะทำอย่างนั้นโดยมีความกระวนกระวายใจน้อยลง
หากจำเป็นต้องอัปเดต LED บ่อยครั้ง เราก็ต้องการ LED ที่รวดเร็วด้วย ในการออกแบบดั้งเดิมของฉัน ฉันใช้ไฟ LED APA102 พวกเขามีอัตราการรีเฟรชประมาณ 20KHz ฉันพยายามรับแถบ LED ด้วย LED เหล่านี้ แต่ผู้ขายออนไลน์ส่ง SK9822 มาให้ฉัน และบอกฉันว่าพวกเขาเหมือนกัน (เกิดขึ้นสองครั้ง …) ดังนั้นเราจะใช้ SK9822 พวกเขามีอัตราการรีเฟรชเพียง 4.7kHz แต่หวังว่าจะเพียงพอ พวกเขายังมีโปรโตคอลที่แตกต่างกันเล็กน้อย เพียงแค่ตระหนัก ดังนั้น ESP32 จึงผลักเฟรมภาพไปที่ FPGA จากนั้น FPGA จะควบคุม LED
ตอนนี้ไฟ LED เพียงแค่ต้องหมุน ดังนั้นเราจึงใช้มอเตอร์กระแสตรง มอเตอร์นี้ควบคุมผ่านสัญญาณ PWM จาก ESP8266 ESP8266 ยังเชื่อมต่อผ่าน WIFI กับ ESP32 ดังนั้นเราจึงต้องการเซ็นเซอร์เพียงตัวเดียวในการวัดความเร็วในการหมุน ในการออกแบบดั้งเดิมฉันใช้สองอัน
ข้อมูลเพิ่มเติมเกี่ยวกับระบบสามารถพบได้ในวิดีโอของฉันเกี่ยวกับการออกแบบดั้งเดิม
เครื่องมือ
ฉันใช้เครื่องมือต่อไปนี้:
- เครื่องพิมพ์ 3 มิติ
- หัวแร้ง
- กาวร้อน
- ซุปเปอร์กาว
- สายไมโคร USB
- กรรไกร
- สว่าน + สว่านไม้ 3 4 8 และ 12 มม.
- ไขควง
- คีมแบน
- เครื่องตัดด้านข้าง
- เครื่องปอกสายไฟ
- อุปกรณ์ระบายสี
- กระดาษทราย
คำสั่ง
ฉันเปิดร้าน TINDIE ดังนั้นคุณสามารถซื้อชุดอุปกรณ์ได้หากต้องการและช่วยฉันทำโครงการเพิ่มเติมเช่นนี้;-)
OSH
เช่นเคยทุกสิ่งที่คุณเห็นที่นี่จะถูกเผยแพร่เป็นโอเพ่นซอร์ส
อัพเดท
มีบางสิ่งที่ฉันต้องการปรับปรุงในอนาคต:
-
ความละเอียดสีที่สูงขึ้นจาก 12 บิตถึง 24 บิต => ดังนั้นเราต้องการ FPGA ที่มี RAM มากกว่า =>
Cmod A7 เข้ากันได้กับพิน:-)
- ESP32 พร้อม PSRAM เพื่อหลีกเลี่ยงปัญหาหน่วยความจำ
- แก้ไขปัญหาแปรง…
เสบียง
อะไหล่สั่งทำ
คุณต้องสั่งหรือสั่งชุดจากฉัน!
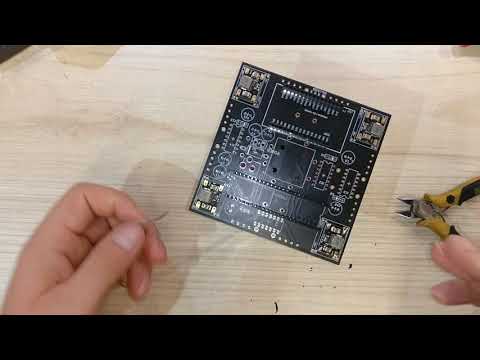
1 * PCB หลัก (ไฟล์ gerber อยู่ภายใต้โฟลเดอร์ gerber main.zip)
1 * Motor Driver PCB (ไฟล์ gerber อยู่ภายใต้โฟลเดอร์ gerber motor.zip)
4 * มุม 3D 1 พิมพ์ (ไฟล์ stl อยู่ใต้โฟลเดอร์ 3D corner.stl)
1 * ตัวยึด PCB หลัก 3D 3 พิมพ์ (ไฟล์ stl อยู่ภายใต้โฟลเดอร์ 3D holder1.stl, holder2.stl, holder3.stl)
1 * ที่วางแปรง 3D 2 พิมพ์ (ไฟล์ stl อยู่ภายใต้โฟลเดอร์ 3D brush1.stl และ brush2.stl)
ชิ้นส่วนมาตรฐาน
ระวัง ลิงค์บางอันมีแพ็คเกจ 10 หรือ 100 ชิ้น
1 ม. * SK9822 LED Strip พร้อม 144 LED/m
1 * Cmod S6 FPGA
1 * Geekcreit 30 Pin ESP32 Development
1 * Geekcreit D1 มินิ V2.2.0 ESP8266
4 * 74HCT04
5 * DC-DC 5V 4A
1 * DC มอเตอร์ 775
44 * 100nf 50V
9 * 220 ยูเอฟ 16V
10 * แม่เหล็กนีโอไดเมียม 10mmx2mm
1 * เซ็นเซอร์เอฟเฟกต์ฮอลล์
2 * แปรงถ่าน Dremel 4000
2 * มอเตอร์แปรงถ่าน
2 * แบริ่ง 6803ZZ
2 * แท่นยึดมอเตอร์ 775
2 * แจ็ค DC 5.5 x 2.1mm
1 * พาวเวอร์ซัพพลาย
1 * ปุ่ม 8mm
2 * XT30PB ปลั๊ก PCB ตัวผู้และตัวเมีย
2 * XT30 เสียบสายเคเบิลชายและหญิง
2 * 130Ohm 1/4W ตัวต้านทาน
2 * MOSFET IRF3708PBF
2 * 1N5400
1 * หัวเข็มแถวเดียว
1 * ส่วนหัวหญิง
1 * สายเคเบิล 30AWG
1 * สายเคเบิล 22AWG
ร้านฮาร์ดแวร์
1 * MDF 500 มม. x 500 มม. x 10 มม
1 * MDF 100 มม. x 500 มม. x 10 มม
4 * MDF 200 มม. x 510 มม. x 10 มม
1 * แก้วอะคริลิค 500 มม. x 500 มม. x 2 มม
12 * มุมโลหะ 40mm x 40mm x 40mm
40 * สกรูไม้ 3mm x 10mm
6 * ตัวเว้นวรรค M3 12 มม.
สกรู M3 และ M4
3 ม. * สายเคเบิล 2.5 มม. 2 สายเดี่ยว/ แข็ง
สีดำสำหรับไม้ MDF
สร้างเวลา: ~ 10 ชั่วโมง
ค่าก่อสร้าง: ~ 300€
ขั้นตอนที่ 1: ดาวน์โหลดไฟล์

ในการเริ่มต้นเราต้องดาวน์โหลดทุกอย่างที่จำเป็นสำหรับโครงการนี้
ไปที่หน้าเผยแพร่พื้นที่เก็บข้อมูลที่นี่
จากนั้นดาวน์โหลด Release.zip จากรีลีสล่าสุด และแตกไฟล์ในคอมพิวเตอร์ของคุณ
ทุกครั้งที่ฉันอ้างอิงถึงไฟล์ในคำแนะนำนี้ คุณจะพบมันที่นั่น;-)
ขั้นตอนที่ 2: โปรแกรมเฟิร์มแวร์
ขั้นตอนที่ 2.1: โปรแกรม FPGA
ในการตั้งโปรแกรม FPGA เราจำเป็นต้องติดตั้งซอฟต์แวร์จาก xilinx:
สำหรับ Windows 10 คุณต้องติดตั้ง: ISE Design Suite สำหรับ Windows 10 (~7GB)
สำหรับ Windows 7 หรือ XP คุณสามารถติดตั้ง: Lab Tools (~1GB)
หลังจากติดตั้ง Open ISE iMPACT แล้วคลิก "ไม่" หากถูกถามและ "ยกเลิก" สำหรับแบบฟอร์มโครงการใหม่ เชื่อมต่อ FPGA Board Cmod S6 และรอให้ไดรเวอร์ติดตั้ง ดับเบิลคลิกที่การสแกนขอบเขต จากนั้นคลิกขวาที่หน้าต่างใหม่และเลือก "Initialize Chain" คลิก "ไม่" อีกครั้งและปิดแบบฟอร์มใหม่ ตอนนี้คุณควรเห็นสัญลักษณ์ "SPI/BPI" ให้ดับเบิลคลิกที่มัน เลือกไฟล์ "SPIFlash.mcs" ในรูปแบบใหม่ให้เลือก "SPI PROM" และ "S25FL128S" และ Data Width "4" คลิก "ตกลง" จากนั้นคลิกครั้งเดียวที่สัญลักษณ์ "FLASH" อีกครั้ง ตอนนี้ควรจะเป็นสีเขียว จากนั้นกด "โปรแกรม" คลิก "ตกลง" ในแบบฟอร์มใหม่และรอ อาจใช้เวลาสักครู่
ทำได้ดีมาก FPGA พร้อมแล้ว;-) คุณสามารถถอดปลั๊กอีกครั้งได้!
ขั้นตอนที่ 2.2: โปรแกรม ESP32
ติดตั้ง esp32 core บน Arduino ID คุณสามารถทำตามบทช่วยสอนนี้ได้ แนะนำให้ใช้ V1.0.2
ห้องสมุดที่จำเป็น:
- AutoPID โดย Ryan Downing V1.0.3 (สามารถติดตั้งบนตัวจัดการไลบรารีได้)
- ArduinoWebsockets โดย Gil Maimon แก้ไขโดยฉัน (ดาวน์โหลดไฟล์ zip และติดตั้ง)
เปิดไฟล์ povdisplay.ino ในโฟลเดอร์ povdisplay
เลือกใต้แผงเครื่องมือ: "DOIT ESP32 DEVKIT V1" ปล่อยให้การตั้งค่าอื่นๆ เหมือนเดิม
เชื่อมต่อบอร์ด esp32 ผ่าน USB และดาวน์โหลดโปรแกรม
ขั้นตอนที่ 2.3: โปรแกรม ESP8266
ติดตั้งแกน ESP8266 บน Arduino ID คุณสามารถทำตามบทช่วยสอนนี้ได้
ไม่จำเป็นต้องใช้ห้องสมุด!
เปิดไฟล์ motordrive.ino ในโฟลเดอร์ motordrive
เลือกภายใต้ Tools Board: "Generic ESP8266 Module" ปล่อยให้การตั้งค่าอื่นๆ เหมือนเดิม
เชื่อมต่อบอร์ด esp8266 ผ่าน USB และดาวน์โหลดโปรแกรม
ขั้นตอนที่ 3: บัดกรี PCBs




ขั้นตอนที่ 3.1 ตัวขับมอเตอร์บัดกรี PCB
ส่วนประกอบต่อไปนี้ถูกบัดกรี:
-
WEMOS1 (Geekcreit D1 มินิ V2.2.0 ESP8266)
- ประสานส่วนหัวของพินเข้ากับบอร์ด WEMOS
- ประสานส่วนหัวของตัวเมียบน PCB
-
DCDC (DC-DC 5V 4A)
- ใช้พิน 4 ตัวสร้างส่วนหัวของพินและประสานตัวแปลง DC-DC เข้ากับบอร์ดโดยตรง
- ระวังการวางแนวควรตรงกับซิลค์สกรีน
- CN1 (แจ็ค DC 5.5 x 2.1 มม.)
-
1N5400
ระวังการวางแนว เส้นสีขาวบนไดโอดต้องอยู่ด้านเดียวกับเส้นบนซิลค์สกรีน
-
220u (220 ยูเอฟ 16V)
ระวังการวางแนว เส้นสีขาวต้องอยู่ตรงข้ามกับเครื่องหมายบวกบนซิลค์สกรีน
- R1 และ R1 (ตัวต้านทาน 130 โอห์ม 1/4W)
-
Q1 และ Q2 (MOSFET IRF3708PBF)
ระวังการวางแนวด้านหลังโลหะต้องอยู่ด้านข้างกับเส้นหนาบนซิลค์สกรีน
-
มอเตอร์ (XT30PB ปลั๊ก PCB ตัวเมีย)
ระวังการวางแนว ปลายมนต้องด้านที่ทำเครื่องหมายไว้บนซิลค์สกรีน
-
LEDS และ TASTER (XT30PB ปลั๊ก PCB ตัวผู้)
ระวังการวางแนว ปลายกลมต้องด้านที่ทำเครื่องหมายไว้บนซิลค์สกรีน
ขั้นตอนที่ 3.2 บัดกรี PCB หลัก
ส่วนประกอบต่อไปนี้ถูกบัดกรี:
-
CMODS6 (Cmod S6 FPGA)
ควรมีส่วนหัวของพินรวมอยู่ด้วย ประสานพวกเขาบน PCB
-
ESP (การพัฒนา Geekcreit 30 พิน ESP32)
ใช้ส่วนหัวของตัวเมียและบัดกรีบน PCB
-
DCDC1 - DCDC4 (DC-DC 5V 4A)
- ใช้พิน 4 พินจากส่วนหัวของพินและบัดกรีตัวแปลง DC-DC เข้ากับบอร์ดโดยตรง
- ระวังการวางแนวควรตรงกับซิลค์สกรีน
- POWER_TEST (แจ็ค DC 5.5 x 2.1 มม.)
-
D1 (1N5400)
ระวังการวางแนว เส้นสีขาวบนไดโอดต้องอยู่ด้านเดียวกับเส้นบนซิลค์สกรีน
-
POWER (XT30PB ปลั๊ก PCB ตัวเมีย)
ระวังการวางแนว ปลายกลมต้องด้านที่ทำเครื่องหมายไว้บนซิลค์สกรีน
-
C1, C3, C4, C6, C7, C9, C10, C11 (220 ยูเอฟ 16 โวลต์)
ระวังการวางแนว เส้นสีขาวบนตัวเก็บประจุต้องอยู่ฝั่งตรงข้ามของเครื่องหมายบวกบนซิลค์สกรีน
- C2, C5, C8, C12 (100nf 50V)
-
IC1 - IC4 (74HCT04)
ระวังจัดตำแหน่งคัตเอาท์ของ IC ให้ตรงกับเครื่องหมายบนซิลค์สกรีน
ขั้นตอนที่ 3.3 กาวร้อน
PCB หลักจะหมุนเร็วมาก ดังนั้นเราจึงต้องติดตัวเก็บประจุ (C1, C3, C4, C6, C7, C9, C10, C11) ลงบน PCB เพื่อหลีกเลี่ยงปัญหา เพียงแค่ใช้กาวร้อนสำหรับสิ่งนั้น
ขั้นตอนที่ 4: เตรียมแถบ

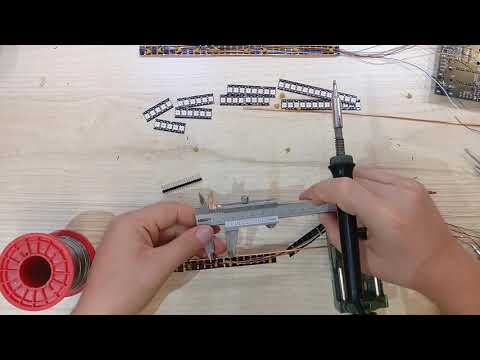



ขั้นตอนที่ 4.1 ตัดแถบเป็นชิ้นๆ
ถอดอุปกรณ์ป้องกันน้ำออกด้วยกรรไกร
เราต้องการปีกสี่ปีกและแต่ละปีกมีสี่กลุ่ม One WING เป็นพิเศษ มี LED มากกว่าหนึ่งดวง
วิง1:
- G1: ไฟ LED 5 ดวง (กลุ่มภายนอกส่วนใหญ่)
- G2: 6 LEDs
- G3: ไฟ LED 8 ดวง
- G4: 14 LEDs
วิง2 - วิง4:
- G1: ไฟ LED 5 ดวง (กลุ่มภายนอกส่วนใหญ่)
- G2: 6 LEDs
- G3: ไฟ LED 8 ดวง
- G4: 13 LEDs
ดังนั้นเราต้องการ LED 129 ดวงและแถบของเรามี 144 ดังนั้นเราจึงมีความทนทานต่อการตัดที่ไม่ถูกต้อง;-) ในกรณีที่เลวร้ายที่สุดคุณสามารถประสานการตัดได้
ตัดให้อยู่กึ่งกลางระหว่างไฟ LED ให้มากที่สุด
ขั้นตอนที่ 4.2 บัดกรีสายเคเบิลเข้ากับแถบ LED
ในแต่ละส่วนของแถบ LED ให้บัดกรีสายไฟ 30AWG สองเส้นบนนาฬิกาและขาข้อมูล นี่คือหมุดสองตัวที่อยู่ตรงกลาง โปรดใช้ความระมัดระวังในการประสานเข้ากับอินพุตของแถบ LED โดยปกติ ลูกศรจะแสดงทิศทางของการไหลของข้อมูล สายไฟควรยาวประมาณครึ่งเมตร
ตัดทุกอย่างออกจากอีกด้านหนึ่งของแถบเพื่อหลีกเลี่ยงการสั้นระหว่างข้อมูลและหมุดนาฬิกาของกลุ่มต่างๆ เมื่อเรารวม WING เข้าด้วยกัน
ขั้นตอนที่ 4.3 ตัวเก็บประจุแบบบัดกรี
ในแต่ละกลุ่มบัดกรีตัวเก็บประจุสองตัว (100nf 50V) ที่ด้านหลังของแถบ LED ที่ปลายแต่ละด้าน สำหรับ G4 ก็บัดกรีหนึ่งอันที่อยู่ตรงกลาง สายเคเบิลควรอยู่ใต้ตัวเก็บประจุเพื่อให้มีที่ว่าง แต่ไม่มากเกินไป
ขั้นตอนที่ 4.4 ประกอบปีกเข้าด้วยกัน
สำหรับแต่ละ WING นำสายไฟจาก G1 ถึง G2 จากนั้นสายไฟเหล่านี้ผ่าน G3 และเหมือนกันกับ G4
ขั้นตอนที่ 4.4 ประสานกลุ่มเข้าด้วยกัน
ตอนนี้เราต้องการสายทองแดง (สาย 2.5mm2 สายเดี่ยว/แข็ง) ตัดเป็นชิ้นยาวประมาณ 30 ซม. แปดชิ้น ลอกฉนวนของสายไฟทั้งหมด ยืดสายให้ตรงมากที่สุด คุณสามารถยึดปลายด้านหนึ่งด้วยแคลมป์สกรูและจับปลายอีกด้านหนึ่งด้วยคีมแบน จากนั้นใช้ค้อนทุบที่คีม
แก้ไขสายเคเบิลด้านหนึ่งเพื่อให้ใช้งานได้ง่ายขึ้น จากนั้นประสานกลุ่มแรกเข้ากับมัน จัดส่วนแถบ LED ให้ตรงกับสายเคเบิลแล้วบัดกรีที่ด้านหนึ่งกับตัวเก็บประจุสองตัว สายเคเบิลควรวางราบบนแถบ LED ต่อด้วยกลุ่มต่อไป ระวังว่าระยะห่างระหว่าง LED สองกลุ่มคือ 7 มม. ในที่สุด LED ทั้งหมดควรมีช่องว่างระหว่างกัน ต่อด้วยอีกสองกลุ่ม ในกลุ่มสุดท้ายประสานตัวเก็บประจุทั้งสามเข้ากับสายไฟ
แล้วตัดสายที่ปลาย ต่อด้วยสายเคเบิลอีกเส้นที่อีกด้านหนึ่งของแถบ
ตอนนี้ WING แรกเสร็จแล้ว! ทำเช่นเดียวกันกับอีกสามปีก
ขั้นตอนที่ 4.5 งอตัวเก็บประจุ
เพียงแค่งอทั้งหมดเพื่อให้แถบบาง
ขั้นตอนที่ 5: ประสานแถบบน PCB หลัก




ขั้นตอนที่ 5.1 ตรวจสอบโพลาไรซ์
อันดับแรก เราต้องรู้จักโพลาไรซ์ของแถบ LED ก่อน กล่าวอีกนัยหนึ่ง: โดยที่ 5V และกราวด์สัมพันธ์กับ PCB สิ่งนี้ขึ้นอยู่กับแถบ LED ที่คุณมีและสามารถหลีกเลี่ยงได้
ถือหนึ่ง WING ไว้บน PCB หลัก ลูกศรบนแถบ LED ต้องชี้ไปที่กึ่งกลางของ PCB ตอนนี้ดูว่า 5V อยู่ที่ DATA หรือด้าน CLOCK ของพินหรือไม่
หาก 5V อยู่ที่ด้าน DATA แสดงว่าคุณทำได้ดี และคุณสามารถใช้ทองแดงขนาด 2.5 มม. 2 เพื่อประสานแถบ LED เข้ากับ PCB ได้โดยตรง
ถ้าไม่ คุณจำเป็นต้องใช้สาย 22AWG ข้ามทั้งสองข้างออก ดังนั้นให้บัดกรีสายเคเบิลเข้ากับแถบ LED แล้วตัดด้านซ้ายและด้านขวาแล้วบัดกรีกับ PCB
ขั้นตอนที่ 5.2 บัดกรีสายเคเบิล 2.5 mm2
ใช้สายทองแดงขนาด 2.5 mm2 ที่เหลือและดึงออกทั้งหมด บัดกรีที่ด้านบนของ PCB ตัดลวดบัดกรีที่ความสูงเท่ากันประมาณ 1 ซม.
ขั้นตอนที่ 5.3 ประสาน WING ตัวแรก
ใช้ WING ที่ยาวกว่าและวางตำแหน่งไว้บน PCB (LEDs1) ตามที่แสดงบนซิลค์สกรีน บัดกรีกับสาย 2.5 mm2 สร้างความสัมพันธ์ที่แน่นแฟ้นจริง ๆ ซึ่งจะเห็นแรงมากระหว่างการหมุน! จากนั้นเชื่อมต่อสายเคเบิลสำหรับ Group 1 กับ G1 Data และ G1 Clock
อย่าลืมประสานการต่อสายไฟตามที่อธิบายไว้ข้างต้น
เชื่อมต่อ ESP32 และ FPGA (48 และ 1 อยู่ที่ด้านที่มีเครื่องหมาย) และจ่ายไฟให้กับบอร์ดด้วยแหล่งจ่ายไฟ
ตอนนี้ไฟ LED ด้านนอกส่วนใหญ่ควรกะพริบเป็นสีน้ำเงิน (อาจใช้เวลาถึง 40 วินาทีในการดำเนินการดังกล่าว) หากไม่ ให้ตรวจสอบว่าคุณเชื่อมต่อ CLOCK และ DATA อย่างถูกต้องหรือไม่
ขั้นตอนที่ 5.4 เซ็นเซอร์เอฟเฟกต์ฮอลล์
ประสานส่วนหัวพินตัวเมีย (มีสามพิน) ไปที่ห้องโถง ต่อมาเราจะเชื่อมต่อเซ็นเซอร์กับมัน
ประสานเซ็นเซอร์ (เซ็นเซอร์ Hall effect) เข้ากับส่วนหัวของหมุดตัวผู้ ลิงค์กับเซนเซอร์และส่วนหัวของพินควรอยู่ที่ประมาณ 25 มม.
ขั้นตอนที่ 5.5 ดำเนินการต่อด้วย WINGS. ที่เหลือ
สำหรับ LEDs2 - LEDs4 == WING2 - WING4 ทำขั้นตอนเดียวกันกับ WING1
บางครั้งเปิด PCB และตรวจสอบว่าทุกอย่างกะพริบหรือไม่ รูปแบบเริ่มต้นด้วยไฟ LED ด้านนอกสุดและเข้าด้านในและเริ่มใหม่อีกครั้ง
ขั้นตอนที่ 5.6 ยอดคงเหลือ
พยายามปรับสมดุล PCB หลักที่อยู่ตรงกลางด้วยวัตถุที่แหลมคม หากด้านใดด้านหนึ่งมีน้ำหนักมากกว่า ให้ลองเพิ่มการบัดกรีที่อีกด้านหนึ่ง ไม่จำเป็นต้องสมบูรณ์แบบ แต่ความไม่สมดุลที่มากเกินไปจะส่งผลให้เกิดการสั่นสะเทือนระหว่างการทำงานมาก ซึ่งอาจนำไปสู่ปัญหาทางกลได้
ขั้นตอนที่ 6: ระบายสีครั้งแรก

ขั้นตอนที่ 6.1: เจาะ
เราต้องเจาะรู:
บนแผ่น MDF 500*500 เราต้องการสองรู ดูไฟล์ drill_wood_500_500.pdf แล้วเจาะรูตามแบบ
บนแผ่น MDF 500*100 เราต้องการรูจำนวนมาก ดังนั้นให้พิมพ์ไฟล์ drill_wood_500_100_A4.pdf และจัดตำแหน่งบนกระดาน เพียงเจาะตรงที่เจาะรูไว้บนกระดาษ
ขั้นตอนที่ 6.2: ระบายสี
ทาสีไม้ด้านใดด้านหนึ่ง สำหรับแผ่น MDF 500 x 500 จะเป็นด้านที่คุณเจาะ
ทาสีไม้ 100x500 ทั้งสองด้าน
คุณยังสามารถทาสีมุมโลหะให้เป็นสีดำได้ มันจะดูดีขึ้น;-)
ส่วนที่เหลือเราจะทาสีเมื่อเราประกอบทุกอย่าง (นอกกล่อง)
ขั้นตอนที่ 7: การประกอบเครื่องกล

ขั้นตอนที่ 7.1 ติดตั้ง PCB ไดรเวอร์มอเตอร์
PCB ติดตั้งอยู่บนบอร์ด MDF 100 x 500 ใช้ตัวเว้นระยะ (ตัวเว้นระยะ M3 12 มม.) และสกรูและน็อต m3 บางตัว
ขั้นตอนที่ 7.2 ติดตั้งโครงยึด
ติดตั้งโครงยึดสองตัว (Motor Mount 775) บนแผ่น MDF 100 x500 ด้วยสกรู M4
ขั้นตอนที่ 7.3 เตรียมผู้ถือ
ต้องปิดการกั้นทั้งสอง (แบริ่ง 6803ZZ) เราแค่ต้องการวงแหวนรอบนอกสองวงจากนั้น
บัดกรีสายไฟ 22AWG บนวงแหวนแต่ละอัน หนึ่งสีดำและหนึ่งสีแดง
นำชิ้นส่วนที่พิมพ์ 3 มิติของ Holder มาประกอบเข้าด้วยกัน
ใส่น็อต M3 ทั้งเจ็ดลงในรูตามลำดับ แล้วเลื่อนวงแหวนด้วยลวดสีแดงที่ตัวยึดก่อน จากนั้นจึงใส่ตัวเว้นวรรคและวงแหวนด้วยลวดสีดำ เพิ่มชิ้นที่สามที่ด้านบนแล้วใส่สกรู
ตัดสายไฟสองเส้นที่ระยะห่าง 2 ซม. แล้วบัดกรีเจ็ก (XT30 Plug Male Cable) เข้ากับมัน สายเคเบิลสีดำไปทางด้านโค้ง
ขั้นตอนที่ 7.4 Mount Motor
ขันสกรูมอเตอร์ (DC Motor 775) เข้ากับแท่นยึดมอเตอร์ที่อยู่ตรงกลางของแผ่น MDF 100 x500
ติดตั้งที่ยึดบนมอเตอร์แล้วขันให้แน่น
ขั้นตอนที่ 7.5 ติดตั้งแปรง
ฉันวางแผนที่จะใช้แปรง Dremel (แปรงคาร์บอน Dremel 4000) เราจำเป็นต้องใช้ถ่านหินชนิดอื่น (Motor Carbon Brushes) เนื่องจากถ่านหินสำหรับแปรง Dremel มีความต้านทานสูงเกินไป ผมมองข้ามไปว่าในกระบวนการพัฒนา ดังนั้นเราจึงใช้แปรงมอเตอร์และขัดให้มีขนาดเท่ากับแปรงเดรเมล
ตัดลวดจากแปรงมอเตอร์ให้ห่างจากถ่านหิน 5 มม.
จากนั้นเราใช้กระดาษทรายตัดถ่านให้เหลือขนาด 8.4 x 6.3 x 4.8 mm
ด้านหนึ่งของแปรงมอเตอร์มีขนาด 6.1 มม. ดังนั้นเราจำเป็นต้องขัดเพียงสองด้านเท่านั้น
คุณสามารถลองถ้ามันเลื่อนได้ง่ายในที่ยึดแปรงก็ไม่เป็นไร
พยายามขัดส่วนโค้งด้านบนเพื่อปรับปรุงการเชื่อมต่อกับวงแหวนโลหะ
บัดกรีลวด 22AWG ที่ถ่านหินสำหรับถ่านหินทั้งสอง ใช้ลวดสีแดงและสีดำ ใส่สปริงจากแปรงเดรเมล
ใส่แปรงลงในที่วางแปรง แปรงที่มีลวดสีแดงอยู่ด้านบน ด้านบนของตัวจับจะหนาขึ้นเล็กน้อย ระวังอย่าให้สปริงทั้งสองสัมผัสกัน
ติดตั้งที่ยึดเข้ากับฐานด้วยน็อตและสกรู m3
ติดตั้งฐานของที่ยึดแปรงเข้ากับตัวยึดมอเตอร์ตัวที่สองที่ยึดไว้ ใช้สกรูและน็อต M4 ที่มาพร้อมกับตัวยึด
มอเตอร์ควรจะสามารถหมุนได้อย่างอิสระ
นำสายไฟสองเส้นระหว่างวงเล็บทั้งสอง
ตัดสายไฟสองเส้นให้ยาวเพื่อให้สามารถเข้าถึง PCB และประสาน jeck (XT30 Plug Male Cable) เข้ากับมันสายเคเบิลสีดำไปทางด้านโค้ง
บัดกรีสาย 22AWG สองเส้นเข้ากับมอเตอร์แล้วตัดให้ห่างเพื่อให้เข้าถึง PCB ได้ง่าย และบัดกรีตัวเมีย (ปลั๊กตัวเมีย XT30) เข้ากับมอเตอร์ สายเคเบิลสีดำไปทางด้านโค้ง
ขั้นตอนที่ 8: เสร็จสิ้น
แนะนำ:
การแสดง CO2: 9 ขั้นตอน (พร้อมรูปภาพ)
")
CO2 Display: ตามชื่อของมัน โครงการ CO2 Display คือเซ็นเซอร์ก๊าซ CO2 ขนาดเล็กที่เสียบเข้ากับ USB เพื่อติดตามมลภาวะในร่มและกลางแจ้งได้อย่างง่ายดาย ระดับ CO2 แสดงสด แต่เป็นไปได้ด้วยแอปพลิเคชันขนาดเล็กที่ให้ไว้ในเอกสาร
สร้าง POV LED Globe ของคุณเอง: 5 ขั้นตอน (พร้อมรูปภาพ)
")
สร้าง POV LED Globe ของคุณเอง: ในโครงการนี้ ฉันจะแสดงให้คุณเห็นว่าฉันรวมชิ้นส่วนเหล็กสองชิ้นเข้ากับ Arduino, APA102 LED Strip และเซ็นเซอร์ Hall effect เพื่อสร้าง POV (ความคงอยู่ของการมองเห็น) RGB LED Globe ได้อย่างไร ด้วยสิ่งนี้ คุณสามารถสร้างภาพทรงกลมได้ทุกประเภท
วิธีทำ Fan POV Display: 6 ขั้นตอน (พร้อมรูปภาพ)
")
วิธีสร้าง Fan POV Display: ในโครงการนี้ ฉันจะแสดงให้คุณเห็นว่าฉันเปลี่ยนพัดลมเก่าธรรมดาให้เป็นจอแสดงผล LED POV ได้อย่างไร ซึ่งสามารถนำเสนอรูปแบบแสง คำ หรือแม้แต่เวลา มาเริ่มกันเลย
ESP8266 พัดลม POV พร้อมการอัพเดตข้อความนาฬิกาและหน้าเว็บ: 8 ขั้นตอน (พร้อมรูปภาพ)
")
ESP8266 พัดลม POV พร้อมการอัปเดตข้อความนาฬิกาและหน้าเว็บ: นี่คือความเร็วตัวแปร POV (การคงอยู่ของการมองเห็น) พัดลมที่แสดงเวลาเป็นระยะ และข้อความสองข้อความที่สามารถอัปเดต "ได้ทันที"พัดลม POV เป็นเว็บเซิร์ฟเวอร์หน้าเดียวที่ให้คุณเปลี่ยนข้อความสองข้อความให้ฉัน
การแสดง Pihole และ Samba: 6 ขั้นตอน

Pihole และ Samba Display: ในบทช่วยสอนนี้ ฉันจะแสดงวิธีสร้างหน้าจอที่แสดงสถิติ PiHole และสถิติ Samba ของคุณ