")
สารบัญ:
- ขั้นตอนที่ 1: การพิมพ์และการประกอบชิ้นส่วน
- ขั้นตอนที่ 2: ฐานใหม่
- ขั้นตอนที่ 3: แก้ไขเล็กน้อย
- ขั้นตอนที่ 4: PCB โฮมเมด
- ขั้นตอนที่ 5: การแกะสลัก PCB
- ขั้นตอนที่ 6: การกัด PCB
- ขั้นตอนที่ 7: Milling PCB: รับไฟล์สำหรับการผลิต
- ขั้นตอนที่ 8: การกัด PCB: กระบวนการกัด
- ขั้นตอนที่ 9: การกัด PCB: ทำความสะอาดงาน
- ขั้นตอนที่ 10: การบัดกรีส่วนประกอบ
- ขั้นตอนที่ 11: เฟิร์มแวร์และซอฟต์แวร์
- ขั้นตอนที่ 12: การทดสอบ
- ขั้นตอนที่ 13: ประกอบต่อ
- ขั้นตอนที่ 14: การปรับเทียบ
- ขั้นตอนที่ 15: การทดสอบภาษาจีนกลางครั้งแรก
- ขั้นตอนที่ 16: ขอบคุณ
- ผู้เขียน John Day day@howwhatproduce.com.
- Public 2024-01-30 13:06.
- แก้ไขล่าสุด 2025-01-23 15:12.


สวัสดีทุกคน, ฉันจะได้รู้จักเครื่องสแกน Ciclop 3D ที่มีชื่อเสียง
ไม่มีขั้นตอนทั้งหมดที่อธิบายอย่างดีเกี่ยวกับโครงการดั้งเดิม
ฉันแก้ไขเพื่อทำให้กระบวนการง่ายขึ้น ขั้นแรกฉันพิมพ์ฐานและกว่าฉันจะปรับ PCB ใหม่ แต่ไปต่อ
ขั้นตอนที่ 1: การพิมพ์และการประกอบชิ้นส่วน
สำหรับชิ้นส่วนประกอบ วิธีที่ดีที่สุดคืออ้างถึงเอกสารต้นฉบับ
www.bq.com/it/support/ciclop/support-sheet
ในหลายภาษาและอธิบายได้ดี
ส่วนที่พิมพ์ค่อนข้างง่ายในการประกอบ
มีวิดีโอจำนวนมากเช่นกัน วิดีโออย่างเป็นทางการคือสิ่งนี้
ขั้นตอนที่ 2: ฐานใหม่


ชิ้นส่วนเดียวที่หายากคือฐาน Plexiglass ดังนั้นฉันจึงออกแบบชิ้นส่วนที่พิมพ์ได้ด้วยเครื่องพิมพ์ Anet A8 3d ของฉัน
คุณสามารถหาโครงการได้ที่นี่
ขั้นตอนที่ 3: แก้ไขเล็กน้อย


ปัญหาอีกประการหนึ่งคือคุณอาจพบเลเซอร์ต้นทุนต่ำที่ไม่พอดีกับตัวยึดเดิม
เลเซอร์ทั่วไปคือเลเซอร์ 12 มม.
คุณจึงใช้รูปแบบที่พิมพ์ออกมานี้ได้
อีกปัญหาหนึ่งคือการหยุดส่วนที่หมุน ฉันคิดว่าวิธีแก้ปัญหาที่ดีกว่าคือการใช้หนังยาง อย่างที่คุณเห็นในภาพ
ขั้นตอนที่ 4: PCB โฮมเมด

สำหรับโปรเจ็กต์นี้ ฉันสร้าง PCB ที่เข้ากันได้อย่างสมบูรณ์กับ Zum scan ตัวเดิมที่มีความซับซ้อนมากขึ้น แต่ฟีเจอร์เพิ่มเติมทั้งหมดไม่ได้ใช้
เวอร์ชันของฉันใช้สำหรับ Arduino Nano ดังนั้นจึงน้อยกว่ารุ่นดั้งเดิม
หากคุณไม่มีทักษะในการผลิต PCB แบบอัตโนมัติ คุณสามารถใช้ไฟล์ gerber ที่คุณสามารถหาได้ในaricle เพื่อส่งไปยังโรงงานที่ผลิต PCB เช่น
ขั้นตอนที่ 5: การแกะสลัก PCB
ฉันไม่เคยใช้เทคนิคนี้ แต่ฉันเพิ่มในขั้นตอนนี้ ไฟล์ svg หรือ PDF สำหรับการผลิต
ขั้นตอนที่ 6: การกัด PCB
ฉันใช้เทคนิคนี้สำหรับการผลิตส่วนตัวของฉัน ฉันเขียน 2 บทความเกี่ยวกับเรื่องนี้:
ประการแรกคือคำแนะนำทีละขั้นตอนเพื่อสร้าง CNC แบบพกพาที่สมบูรณ์แบบและปรับให้เหมาะสมสำหรับการกัด CNC
ที่นี่คู่มือ
กว่าคู่มือก่อนหน้าที่อธิบายทีละขั้นตอนวิธีการใช้เครื่อง วิธีสร้าง PCB และวิธีสร้างไฟล์สำหรับการผลิต
นี่คือคู่มืออื่น ๆ
ขั้นตอนที่ 7: Milling PCB: รับไฟล์สำหรับการผลิต
ฉันเพิ่มไฟล์สำหรับการผลิต gerber หรือ gcode สำหรับเครื่องกัดโดยตรง
ขั้นตอนที่ 8: การกัด PCB: กระบวนการกัด



ขั้นแรกให้กัดก้นทองแดงแล้วเจาะรู
ขั้นตอนที่ 9: การกัด PCB: ทำความสะอาดงาน


ใช้กระดาษทรายทำกระดานให้เรียบและสะอาด
ขั้นตอนที่ 10: การบัดกรีส่วนประกอบ



สำหรับบอร์ดนี้ฉันใช้:
- Arduino นาโน
- ไดรเวอร์ A4988 Stepper
- ตัวต้านทาน 2x 1k
- ตัวต้านทาน 1x 10k
- 2x 2n2222 ทรานซิสเตอร์
- 5.5 Barrel สำหรับแรงดันไฟฟ้าขาเข้า
ฉันใช้แหล่งจ่ายไฟ 12v 2A (ไปยังกระบอกสูบ) เพื่อจ่ายไฟให้กับไดรเวอร์สเต็ปเปอร์
กว่าขั้วต่อ usb ก็เพียงพอสำหรับเลเซอร์และ Arduino
ขั้นตอนที่ 11: เฟิร์มแวร์และซอฟต์แวร์

คุณสามารถดาวน์โหลดเฟิร์มแวร์เพื่ออัปโหลดไปยัง Arduino ได้จากที่นี่
github.com/bqlabs/horus-fw
ตามที่อธิบายไว้ในคู่มือ กล้องคือเว็บแคม Logitech C270 HD ซึ่งเป็นไดรเวอร์ที่นี่
support.logitech.com/en_ca/product/hd-webca…
คุณสามารถค้นหาซอฟต์แวร์ได้ที่นี่
horus.readthedocs.io/en/release-0.2/
หากคุณมีปัญหาในการดาวน์โหลดคุณสามารถไปที่นี่
github.com/LibreScanner/horus/releases
ขั้นตอนที่ 12: การทดสอบ

ก่อนอื่นฉันทดสอบทั้งหมดโดยไม่มีกล้องและใช้งานได้ดี
คุณสามารถใช้ไฟล์ ino เพื่อตรวจสอบเลเซอร์และ stepper
ขั้นตอนที่ 13: ประกอบต่อ


กว่าฉันจะเพิ่มกล้อง แก้ไขบอร์ด และเพิ่มกระดาษสีดำที่ด้านบนของแพลตฟอร์ม
ขั้นตอนที่ 14: การปรับเทียบ
มีวิดีโอมากมายเกี่ยวกับการปรับเทียบ ขั้นตอนนี้ง่ายมาก
ฉันเข้าใจวิดีโอขั้นต่ำนี้ด้วย Ciclop ใหม่ของฉัน
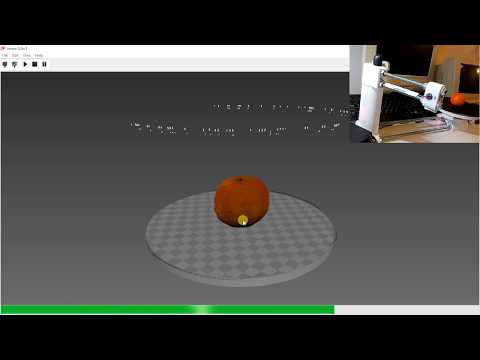
ขั้นตอนที่ 15: การทดสอบภาษาจีนกลางครั้งแรก
ในวิดีโอนี้ ฉันจะสแกนเฉพาะวัตถุ แต่เพื่อให้ได้ภาพที่ดี คุณต้องทำการโพสต์ด้วยซอฟต์แวร์เช่น MeshLab
ขั้นตอนที่ 16: ขอบคุณ
ตอนนี้เริ่มสแกนทั้งหมด
แนะนำ:
Arduino ระบบเตือนที่จอดรถย้อนกลับ - ทีละขั้นตอน: 4 ขั้นตอน

Arduino ระบบเตือนที่จอดรถย้อนกลับ | ทีละขั้นตอน: ในโครงการนี้ ฉันจะออกแบบวงจรเซ็นเซอร์จอดรถย้อนกลับ Arduino อย่างง่ายโดยใช้ Arduino UNO และ HC-SR04 Ultrasonic Sensor ระบบเตือนการย้อนกลับของรถยนต์ที่ใช้ Arduino นี้สามารถใช้สำหรับการนำทางอัตโนมัติ การกำหนดระยะของหุ่นยนต์ และการควบคุมช่วงอื่นๆ
การลอยแบบอะคูสติกด้วย Arduino Uno ทีละขั้นตอน (8 ขั้นตอน): 8 ขั้นตอน
: 8 ขั้นตอน")
การลอยแบบอะคูสติกด้วย Arduino Uno ทีละขั้นตอน (8 ขั้นตอน): ตัวแปลงสัญญาณเสียงล้ำเสียง L298N Dc ตัวเมียอะแดปเตอร์จ่ายไฟพร้อมขา DC ตัวผู้ Arduino UNOBreadboardวิธีการทำงาน: ก่อนอื่น คุณอัปโหลดรหัสไปยัง Arduino Uno (เป็นไมโครคอนโทรลเลอร์ที่ติดตั้งดิจิตอล และพอร์ตแอนะล็อกเพื่อแปลงรหัส (C++)
RC ติดตามหุ่นยนต์โดยใช้ Arduino – ทีละขั้นตอน: 3 ขั้นตอน

RC Tracked Robot โดยใช้ Arduino – ทีละขั้นตอน: เฮ้ พวก ฉันกลับมาพร้อมกับโครงหุ่นยนต์สุดเจ๋งจาก BangGood หวังว่าคุณจะผ่านโครงการก่อนหน้านี้ของเรา - Spinel Crux V1 - หุ่นยนต์ควบคุมด้วยท่าทาง, Spinel Crux L2 - Arduino Pick and Place Robot ด้วยแขนหุ่นยนต์และ Badland Braw
เรียนรู้วิธีการวาดเทียน - ทีละขั้นตอน: 6 ขั้นตอน

เรียนรู้วิธีการวาดเทียน - ทีละขั้นตอน: เทียนนี้ใช้เวลาวาด 10 นาทีหากคุณทำตามขั้นตอนของฉันอย่างระมัดระวัง Enjoy
DIY Arduino Robotic Arm ทีละขั้นตอน: 9 ขั้นตอน

DIY Arduino Robotic Arm ทีละขั้นตอน: บทช่วยสอนเหล่านี้สอนวิธีสร้างแขนหุ่นยนต์ด้วยตัวเอง