")
สารบัญ:
- ขั้นตอนที่ 1: ปริมาณมันทำงานอย่างไร
- ขั้นตอนที่ 2: โปรดทราบก่อนเริ่ม
- ขั้นตอนที่ 3: รวบรวมวัสดุทั้งหมด
- ขั้นตอนที่ 4: ขนาดต่างๆ
- ขั้นตอนที่ 5: การสร้างร่างกาย
- ขั้นตอนที่ 6: การประกอบแอคทูเอเตอร์และการผลิตเพลท
- ขั้นตอนที่ 7: การปรับแต่งลักษณะคลื่น
- ขั้นตอนที่ 8: การเชื่อมต่อทางอิเล็กทรอนิกส์และโปรแกรม
- ขั้นตอนที่ 9: การควบคุมแอคทูเอเตอร์ด้วยโปรแกรมที่ขับเคลื่อนด้วยเมนู
- ขั้นตอนที่ 10: วิธีใช้งาน Wave Tank
- ผู้เขียน John Day day@howwhatproduce.com.
- Public 2024-01-30 13:06.
- แก้ไขล่าสุด 2025-01-23 15:12.



ถังคลื่นคือห้องทดลองสำหรับการสังเกตพฤติกรรมของคลื่นพื้นผิว แท็งก์คลื่นทั่วไปคือกล่องที่บรรจุของเหลว โดยปกติแล้วจะเป็นน้ำ โดยปล่อยให้พื้นที่เปิดโล่งหรือเติมอากาศอยู่ด้านบน ที่ปลายด้านหนึ่งของถัง ตัวกระตุ้นจะสร้างคลื่น ปลายอีกด้านมักจะมีพื้นผิวดูดซับคลื่น
โดยปกติรถถังเหล่านี้ต้องใช้เงินเป็นจำนวนมาก ดังนั้นฉันจึงพยายามสร้างวิธีแก้ปัญหาที่ถูกจริงๆ สำหรับนักเรียนที่ต้องการใช้ถังเพื่อทดสอบโครงงานของพวกเขา
ขั้นตอนที่ 1: ปริมาณมันทำงานอย่างไร
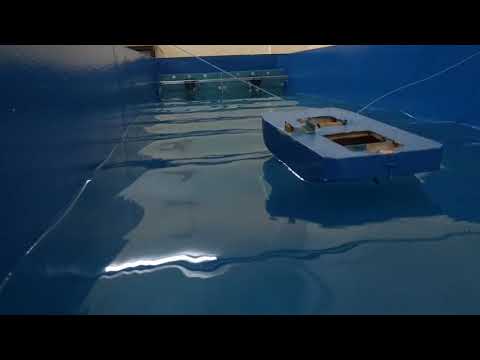
ดังนั้นโครงการจึงประกอบด้วยตัวกระตุ้นสองตัวที่ทำขึ้นโดยใช้การอัดขึ้นรูปอลูมิเนียม v-slot
สเต็ปเปอร์มอเตอร์เชื่อมต่อกับแอคชูเอเตอร์แต่ละตัว และมอเตอร์ทั้งสองถูกควบคุมโดยไดรฟ์สเต็ปเปอร์มอเตอร์ตัวเดียวกัน ดังนั้นจึงไม่มีความล่าช้า
Arduino ใช้เพื่อควบคุมไดรเวอร์มอเตอร์ โปรแกรมที่ขับเคลื่อนด้วยเมนูใช้เพื่อป้อนข้อมูลไปยัง arduion ที่เชื่อมต่อผ่านพีซี เพลทแอคทูเอเตอร์จะติดตั้งอยู่บนโครงสำหรับตั้งสิ่งของ v-slot ซึ่งจะกลับไปกลับมาเมื่อมอเตอร์สตาร์ท และการเคลื่อนตัวไปมาของเพลตทำให้เกิดคลื่นภายในถัง ความสูงของคลื่นและความยาวคลื่นสามารถเปลี่ยนแปลงได้โดยการเปลี่ยนความเร็วของ มอเตอร์ผ่าน Arduino
ขั้นตอนที่ 2: โปรดทราบก่อนเริ่ม

ฉันไม่ได้พูดถึงเรื่องเล็ก ๆ ส่วนใหญ่เกี่ยวกับวิธีใช้ Arduino หรือวิธีการเชื่อมเพื่อให้บทช่วยสอนนี้มีขนาดเล็กและเข้าใจง่าย สิ่งที่ขาดหายไปส่วนใหญ่จะเคลียร์ในภาพและวิดีโอ โปรดส่งข้อความถึงฉันหากมีปัญหาหรือคำถามใดๆ เกี่ยวกับโครงการ
ขั้นตอนที่ 3: รวบรวมวัสดุทั้งหมด
- Arduino ไมโครคอนโทรลเลอร์
- 2 * สเต็ปเปอร์มอเตอร์ (แรงบิด 2.8 กก. ต่อมอเตอร์)
- 1 * ตัวขับสเต็ปเปอร์มอเตอร์
- 2 * V สล็อตระบบโครงสำหรับตั้งสิ่งของ
- เหล็กหรือแผ่นเหล็กสำหรับตัวถัง
- L-stiffeners เพื่อรองรับร่างกาย
- แผ่นไฟเบอร์หรือพลาสติกสำหรับทำเพลทแอคชูเอเตอร์
- สายไฟ แหล่งจ่ายไฟ DC 48 โวลต์
ฉันไม่ได้รวมวัสดุสำหรับโครงสำหรับตั้งสิ่งของ v-slot เพราะรายการจะใหญ่มากจากนั้นเพียงแค่ google v-slot คุณจะได้รับวิดีโอมากมายเกี่ยวกับวิธีการประกอบฉันใช้การอัดขึ้นรูปอลูมิเนียม 2040 ความจุของมอเตอร์และความจุของแหล่งจ่ายไฟจะเปลี่ยนไป หากคุณต้องการรับภาระมากขึ้น
ขนาดถัง
ความยาว 5.50 ม.
ความกว้าง 1.07 m
ความลึก 0.50 ม.
ขั้นตอนที่ 4: ขนาดต่างๆ



เพื่อให้สิ่งต่าง ๆ ง่ายขึ้นและการสอนสั้นลง ฉันได้ถ่ายภาพส่วนประกอบต่าง ๆ ด้วยมาตราส่วนเพื่อให้คุณเห็นขนาดของสิ่งเหล่านี้
ขั้นตอนที่ 5: การสร้างร่างกาย




ตัวเครื่องทำด้วยเหล็กหล่อหนา 3 มม.
ความกว้างถัง 1.10 เมตร ยาว 5 เมตร สูง 0.5 เมตร
ตัวถังประกอบด้วยเหล็กอ่อนพร้อมตัวเสริมความแข็งแกร่งรอบ ๆ ตัวเมื่อจำเป็น แผ่นเหล็กดัดงอและตัดเป็นชิ้น ๆ ตามขนาดของถัง ส่วนเหล่านี้ถูกสร้างขึ้นโดยการเชื่อมเข้าด้วยกัน เหล็กชุบยังเชื่อมเข้าด้วยกันเพื่อให้โครงสร้างแข็งแรงขึ้น
แผ่นแรกงอเป็นขนาดที่ต้องการในส่วนต่างๆ จากนั้นส่วนเหล่านี้ถูกเชื่อมเข้าด้วยกันเพื่อสร้างร่างกาย มีการเพิ่มสารทำให้แข็งเป็นขนาดตัวรองรับการแข็งตัวดังแสดงในรูปภาพ
ขั้นตอนที่ 6: การประกอบแอคทูเอเตอร์และการผลิตเพลท



แอคทูเอเตอร์สร้างขึ้นโดยใช้ระบบ v-slot ซึ่งมีราคาถูกและง่ายต่อการสร้าง คุณสามารถ google ออนไลน์เพื่อประกอบสิ่งเหล่านี้ได้ ฉันใช้ลีดสกรูแทนตัวขับสายพานเพื่อเพิ่มความสามารถในการรับน้ำหนัก ฉันไม่ได้รวมบทช่วยสอนการประกอบเพราะมันจะเปลี่ยนตามน้ำหนักที่คุณต้องการบรรทุก สำหรับฉันโหลดที่ความเร็วสูงสุดประมาณ 14Kg
แผ่นแอคชูเอเตอร์ถูกสร้างขึ้นโดยใช้แผ่น frp และยังสามารถใช้อะคริลิกได้ โครงสแตนเลสถูกสร้างขึ้นเพื่อรองรับแผ่น frp
กรอบไม้พาย
โครงพายทำจากสแตนเลส เหล็กกล้าไร้สนิมสามารถกันน้ำได้และจะต้านทานการกัดกร่อน ส่วนสี่เหลี่ยมจัตุรัสขนาด 2 x 2 ซม. ใช้สำหรับโครงไม้พาย เฟรมที่แข็งแรงเป็นสิ่งจำเป็น เนื่องจากจะมีการทำงานแบบไซคลิกจำนวนมากบนแป้นพายระหว่างการสร้างคลื่น โครงเหล็กจะไม่งอและจะสร้างคลื่นไซน์ปกติ
L-clamp แบบกำหนดเองถูกสร้างขึ้นเพื่อเชื่อมต่อเพลตแอคทูเอเตอร์กับเพลทโครงสำหรับตั้งสิ่งของบนระบบ vslot
ขั้นตอนที่ 7: การปรับแต่งลักษณะคลื่น



แทงค์สามารถสร้างความสูงของคลื่นได้ตามความต้องการ เพื่อสร้างความสูงของคลื่นที่แตกต่างกัน RPM ของมอเตอร์จะถูกปรับ เพื่อให้ได้ความสูงของคลื่นขนาดใหญ่ RPM ของมอเตอร์จะเพิ่มขึ้น สิ่งนี้จะลดความยาวคลื่นของคลื่นด้วย ความคล้ายคลึงกันในการเพิ่มความยาวคลื่น RPM ของมอเตอร์จะลดลง RPM สามารถปรับได้โดยเลือกตัวเลือก RPM ที่กำหนดเองจากเมนู
RPM สูงสุด = 250
RPM ขั้นต่ำ = 50
ด้านล่างนี้คือตัวอย่างความสูงของคลื่นต่างๆ ที่บันทึกโดยมาตรความเร่ง ภาพแรกเป็นข้อมูลที่บันทึกด้วย RPM สูง ส่งผลให้เราได้รับความสูงของคลื่นสูง ภาพที่สองแสดงความสูงของคลื่นที่ลดลงและความยาวคลื่นที่เพิ่มขึ้นของกราฟ ซึ่งเป็นข้อมูลที่บันทึกโดยเครื่องเร่งความเร็วและแสดงลักษณะคลื่นที่แท้จริงของคลื่นที่สร้างขึ้น
ขั้นตอนที่ 8: การเชื่อมต่อทางอิเล็กทรอนิกส์และโปรแกรม

ขณะเชื่อมต่อแหล่งจ่ายไฟ ระวังขั้วเชื่อมต่อ เชื่อมต่อขั้วบวกกับขั้วบวกและลบเป็นลบ ทำการเชื่อมต่อสำหรับมอเตอร์และไดรเวอร์ดังที่แสดงในภาพ เมื่อการเชื่อมต่อทั้งหมดถูกต้องแล้ว ให้ต่อหมุดไมโครคอนโทรลเลอร์ (8, 9, 10 และ 11) ให้กับตัวขับสเต็ปเปอร์มอเตอร์ เชื่อมต่อไมโครคอนโทรลเลอร์กับพีซีด้วย USB เริ่ม Arduino IDE > มอนิเตอร์แบบอนุกรม
โปรแกรมนี้รวมอยู่ในบทช่วยสอนและอธิบายตนเองได้โดยใช้ตัวพิมพ์เล็กสลับและคำสั่ง if else เพื่อดำเนินการ นักเรียนมัธยมปลายสามารถเข้าใจได้ง่ายมาก
นี่คือลิงค์ google drive ไปยังโปรแกรม
โปรแกรมควบคุม Arduino
ขั้นตอนที่ 9: การควบคุมแอคทูเอเตอร์ด้วยโปรแกรมที่ขับเคลื่อนด้วยเมนู

เมื่อไมโครคอนโทรลเลอร์เชื่อมต่อกับพีซีอย่างถูกต้อง คุณจะมีเมนูที่คล้ายกัน ในการเลือกตัวเลือกเพียงแค่พิมพ์หมายเลขถัดจากตัวเลือกแล้วกด Enter
ตัวอย่าง:-
วิธีเลือก “กระตุ้นด้วยความถี่สูงสุด” ให้พิมพ์ 1 แล้วกด Enter
หากต้องการหยุดการกระทำประเภท 0 แล้วกด Enter
หยุดฉุกเฉิน
หากต้องการหยุดแอคทูเอเตอร์ให้กดศูนย์ “0” แล้วป้อน
หากต้องการหยุดฉุกเฉิน ให้กดรีเซ็ตบนไมโครคอนโทรลเลอร์หรือตัดแหล่งจ่ายไฟ
ขั้นตอนที่ 10: วิธีใช้งาน Wave Tank

รถถังนี้เป็นส่วนหนึ่งของโครงการหลักของฉัน แท็งก์ได้รับการทดสอบสำหรับรุ่นของคลื่นปกติที่แตกต่างกันในสภาพทะเลหัวสำหรับแบบจำลองเรือขนาด การทดสอบคลื่นคลื่นประสบผลสำเร็จ ต้นทุนโดยรวมสำหรับการพัฒนาโครงการนี้คือ Rs. 81, 000 (แปดหมื่นหนึ่งพันเท่านั้น) ในระยะเวลาสองเดือน
สำหรับคำถามใด ๆ โปรดแสดงความคิดเห็น

รางวัลรองชนะเลิศอันดับ 1 การแข่งขันน้ำ
แนะนำ:
DIY "PC Usage Meter ROG Base" โดยใช้ Arduino และ Python: 5 ขั้นตอน (พร้อมรูปภาพ)
")
DIY "เครื่องวัดการใช้งานพีซี ROG Base" โดยใช้ Arduino และ Python: ************************************* +ก่อนอื่น คำแนะนำนี้เขียนขึ้นโดยผู้ที่ไม่ใช่เจ้าของภาษาอังกฤษ…… ไม่ใช่ศาสตราจารย์ภาษาอังกฤษ ดังนั้นโปรดแจ้งข้อผิดพลาดทางไวยากรณ์ก่อนที่จะล้อเลียนฉัน:p +และโปรดอย่าเลียนแบบ
Minimalist IoT Clock (โดยใช้ ESP8266, Adafruit.io, IFTTT และ Arduino IDE): 10 ขั้นตอน (พร้อมรูปภาพ)
: 10 ขั้นตอน (พร้อมรูปภาพ)")
Minimalist IoT Clock (โดยใช้ ESP8266, Adafruit.io, IFTTT และ Arduino IDE): ในบทช่วยสอนนี้ ฉันจะแสดงวิธีสร้างนาฬิกามินิมัลลิสต์ที่ซิงโครไนซ์กับอินเทอร์เน็ต ฉันทดสอบกับบอร์ดที่ใช้ ESP8266 สองบอร์ด: Firebeetle และ NodeMCU ไมโครคอนโทรลเลอร์รับเวลาปัจจุบันจากเซิร์ฟเวอร์ Google และแสดงบน
จอแสดงผล LED Matrix แบบเลื่อน 48 X 8 โดยใช้ Arduino และ Shift Registers: 6 ขั้นตอน (พร้อมรูปภาพ)
")
จอแสดงผลเมทริกซ์ LED แบบเลื่อนได้ 48 X 8 โดยใช้ Arduino และ Shift Registers: สวัสดีทุกคน! นี่เป็นคำสั่งแรกของฉันและมันคือทั้งหมดที่เกี่ยวกับการสร้างเมทริกซ์ LED การเลื่อนที่ตั้งโปรแกรมได้ 48 x 8 โดยใช้ Arduino Uno และการลงทะเบียนกะ 74HC595 นี่เป็นโครงการแรกของฉันกับบอร์ดพัฒนา Arduino มันเป็นความท้าทายที่มอบให้กับม
โปรแกรมซีเควนเซอร์ RGB LED ที่ตั้งโปรแกรมได้ (โดยใช้ Arduino และ Adafruit Trellis): 7 ขั้นตอน (พร้อมรูปภาพ)
: 7 ขั้นตอน (พร้อมรูปภาพ)")
RGB LED Sequencer ที่ตั้งโปรแกรมได้ (โดยใช้ Arduino และ Adafruit Trellis): ลูกชายของฉันต้องการแถบ LED สีเพื่อให้แสงสว่างบนโต๊ะทำงานของพวกเขา และฉันไม่ต้องการใช้ตัวควบคุมแถบ RGB แบบกระป๋อง เพราะฉันรู้ว่าพวกเขาคงจะเบื่อกับรูปแบบที่ตายตัว ตัวควบคุมเหล่านี้มี ฉันยังคิดว่ามันจะเป็นโอกาสที่ดีในการสร้าง
DIY PC Ambient Lighting โดยใช้ Arduino และ WS2812b LEDs: 6 ขั้นตอน (พร้อมรูปภาพ)
")
DIY PC Ambient Lighting โดยใช้ Arduino และ WS2812b LEDs: ต้องการความลึกมากขึ้นสำหรับประสบการณ์การเล่นเกม/การรับชมภาพยนตร์ของฉัน ดังนั้นนี่คือวิธีที่ฉันติดตั้งไฟแวดล้อม ก่อนที่เราจะเริ่มต้น โปรเจ็กต์นี้ต้องการให้คุณรู้วิธีใช้หัวแร้งและพื้นฐานอื่นๆ เครื่องมือ หากคุณไม่สะดวกบัดกรี