")
สารบัญ:
- ผู้เขียน John Day day@howwhatproduce.com.
- Public 2024-01-30 13:07.
- แก้ไขล่าสุด 2025-01-23 15:12.

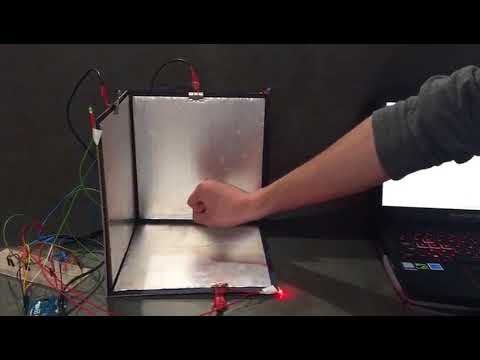

ในคำแนะนำนี้จะอธิบายวิธีติดตามการเคลื่อนไหวของมือในพื้นที่ 3 มิติโดยใช้หลักการตรวจจับแบบคาปาซิทีฟ การเปลี่ยนระยะห่างระหว่างฟอยล์อลูมิเนียมที่มีประจุกับมือของคุณ ความจุของตัวเก็บประจุจะแตกต่างกันไป วิธีนี้สามารถใช้เป็นทางเลือกระดับล่างสำหรับระบบเฉื่อยและออปติคัลเพื่อติดตามการเคลื่อนไหวในพื้นที่ 3 มิติ ในต้นแบบนี้ เราได้เพิ่ม LED ซึ่งจะเรืองแสงเมื่อวัตถุเคลื่อนเข้าใกล้แผ่นอลูมิเนียมฟอยล์มากเกินไป
ขั้นตอนที่ 1: เครื่องมือและวัสดุที่จำเป็น
- ตัวต้านทาน 3x 270k Ohm
- ตัวต้านทาน 3x 10k โอห์ม
- 3x คลิปจระเข้
- 1x LED สีแดง
- 1x ไฟ LED สีฟ้า
- 1x LED สีเขียว
- ตัวต้านทาน 3x 220 โอห์ม
- ประสาน
- การหดตัวด้วยความร้อน
- สายชิลด์
- Arduino Uno
- อลูมิเนียมฟอยล์
- กระดาษแข็ง
- เทป
- สเปรย์กาว
- เขียงหั่นขนม
- สายต่อ (ความยาวต่างกัน)
ขั้นตอนที่ 2: การสร้างเฟรม




ตัดกระดาษแข็งสามแผ่น (250x250 มม.) และอลูมิเนียมฟอยล์สามแผ่น (230x230 มม.) ใช้กาวสเปรย์ที่ด้านหนึ่งของฟอยล์อลูมิเนียมแล้วทาลงบนแผ่นกระดาษแข็ง ในต้นแบบนี้ แผ่นอลูมิเนียมฟอยล์จะทำหน้าที่เป็นเซ็นเซอร์คาปาซิทีฟของเรา ดังนั้น ตรวจสอบให้แน่ใจว่ามีพื้นที่เพียงพอระหว่างอลูมิเนียมฟอยล์กับขอบของกระดาษแข็ง เพื่อไม่ให้มีการสัมผัสระหว่างแผ่นฟอยล์ต่างๆ เมื่อประกอบกรอบแล้ว เมื่อฟอยล์ถูกนำไปใช้กับกระดาษแข็งแล้วก็ถึงเวลาประกอบกระดาษแข็งสามชิ้นโดยใช้เทปเพื่อทำให้กรอบสมบูรณ์ อีกครั้ง ตรวจสอบให้แน่ใจว่าไม่มีการสัมผัสระหว่างแผ่นอลูมิเนียมฟอยล์ต่างๆ
ขั้นตอนที่ 3: การเดินสายไฟของ Shield Wires ไปยังเพลตและ Arduino



สิ่งสำคัญคือต้องใช้สายเคเบิลที่มีฉนวนหุ้มเพื่อเชื่อมต่อฟอยล์กับวงจร การใช้สายเคเบิลปกติจะสร้างเอฟเฟกต์เสาอากาศและรบกวนการอ่านเซ็นเซอร์ของคุณ ตรวจสอบให้แน่ใจว่าคุณมีสายหุ้มฉนวน 3 เส้นที่มีความยาวประมาณ 50 ซม. นำสายเคเบิลหนึ่งเส้น ลอกลวดออก ตัดสายป้องกัน และใช้เฉพาะสายด้านในเพื่อเชื่อมต่อโดยการบัดกรีลวดเข้ากับคลิปจระเข้ ตรวจสอบให้แน่ใจว่าได้ใช้การหดตัวด้วยความร้อนเพื่อปกปิดจุดต่อประสาน คลิปหนีบปากจระเข้กับฟอยล์อลูมิเนียม
ต่อสายชิลด์ทั้งหมดเข้ากับแถวบวกของเขียงหั่นขนมของคุณ จากนั้นเชื่อมต่อแถวบวกนี้กับการเชื่อมต่อ 5V บน Arduino ของคุณ ตอนนี้ใช้สายหลักจากสายชิลด์และต่อตัวต้านทาน 10k Ohm และ 220k Ohm แบบขนาน เชื่อมต่อสิ่งนี้กับพอร์ตเอาต์พุตของ Arduino ของคุณ (เราใช้ 8, 9 และ 10)
ทำซ้ำขั้นตอนนี้อีก 2 ครั้งสำหรับระนาบอื่นของต้นแบบ
ขั้นตอนที่ 4: การเดินสายไฟของ LEDs




ประสานปลายไฟ LED กับลวดยาวเพื่อให้สามารถเข้าถึงมุมของเพลตตามลำดับจากบอร์ด Arduino
เราใช้พิน 2, 3 และ 4 เป็นพินเอาต์พุตสำหรับ LED ของเรา เอาต์พุตนี้เชื่อมต่อกับเขียงหั่นขนมและเชื่อมต่อกับขาบวกของ LED ต่อขั้วลบของ LED เข้ากับตัวต้านทาน 330 โอห์ม ปลายอีกด้านหนึ่งของตัวต้านทานเชื่อมต่อกับกราวด์ของเขียงหั่นขนมซึ่งเชื่อมต่อกับกราวด์ของ Arduino ทำซ้ำสำหรับ LED ทั้ง 3 ดวง ในต้นแบบของเรา LED สีน้ำเงินเชื่อมต่อกับระนาบ Y, LED สีแดงไปยังระนาบ Z และ LED สีเขียวกับระนาบ X ติดเทป LED กับระนาบที่เกี่ยวข้องเพื่อรับข้อเสนอแนะโดยตรงเมื่อใช้ต้นแบบ
หากคุณไม่ได้ใช้เขียงหั่นขนมและต้องการต่อสายชิลด์เข้ากับ Arduino โดยตรง คุณสามารถดูรูปภาพที่แนบมาเพื่อดูภาพรวมที่ดีของการเชื่อมต่อแบบบัดกรี การเชื่อมต่อขั้นสุดท้ายของคุณควรมีลักษณะเหมือนภาพโดยรวม
ขั้นตอนที่ 5: การเข้ารหัส
ในไฟล์แนบ เราได้วางโค้ดที่เราใช้สำหรับการทดสอบนี้ สำหรับข้อมูลเชิงลึกเพิ่มเติม หลังจากแต่ละคำสั่งหลัก จะมีการแสดงความคิดเห็น โดยอธิบายว่าเกิดอะไรขึ้นในโค้ด เปิดโค้ดในซอฟต์แวร์ Arduino บนพีซี แล้วอัปโหลดไปยัง Arduino หากคุณกำลังใช้แล็ปท็อป ตรวจสอบให้แน่ใจว่าได้ชาร์จแล็ปท็อปแล้ว มิฉะนั้นต้นแบบของคุณจะใช้งานไม่ได้
ขั้นตอนที่ 6: การใช้ต้นแบบ
วิธีการติดตามการเคลื่อนไหว 3 มิตินี้มีความละเอียดอ่อนมากสำหรับตัวแปรรอบข้าง ดังนั้นตรวจสอบให้แน่ใจว่าได้ปรับเทียบค่าในโค้ดกับสถานการณ์ของคุณเอง คุณสามารถใช้มอนิเตอร์แบบอนุกรมเพื่อรับค่าที่ถูกต้อง เคล็ดลับ: คุณสามารถสร้างการสอบเทียบได้ด้วยตัวเอง โดยจะใช้ค่าเฉลี่ย + 10% เมื่อรันโค้ด ในวิดีโอแสดงให้เห็นว่าต้นแบบควรทำงานอย่างถูกต้องอย่างไร
แนะนำ:
Capacitive Stylus สำหรับปากกาแบบใช้แล้วทิ้ง: 6 ขั้นตอน (พร้อมรูปภาพ)
")
Capacitive Stylus สำหรับปากกาแบบใช้แล้วทิ้ง: ฉันมี Uni-ball Micro Roller Ball Pen โหล ฉันต้องการเพิ่มปากกาสไตลัสแบบคาปาซิทีฟให้กับฝาปิดอันใดอันหนึ่ง จากนั้นจึงสามารถย้ายฝาครอบและปากกาสไตลัสจากปากกาหนึ่งไปยังปากกาถัดไปได้ เนื่องจากหมึกแต่ละอันจะหมดลง ฉันรู้สึกขอบคุณ Jason Poel Smith สำหรับ
ESP32 Capacitive Touch Input โดยใช้ "Metallic Hole Plugs" สำหรับปุ่ม: 5 ขั้นตอน (พร้อมรูปภาพ)
")
ESP32 Capacitive Touch Input โดยใช้ "Metallic Hole Plugs" สำหรับปุ่ม: ขณะที่ฉันกำลังตัดสินใจออกแบบสำหรับโปรเจ็กต์ที่ใช้ ESP32 WiFi Kit 32 ที่กำลังจะมีขึ้นซึ่งต้องการอินพุตสามปุ่ม ปัญหาหนึ่งที่เห็นได้ชัดเจนคือชุด WiFi 32 ไม่มีปุ่มกดเชิงกลเพียงปุ่มเดียว แต่เพียงอย่างเดียวสามปุ่มกล f
DIY Capacitive Discharge 18650 Spot Battery Welder # 6: 11 ขั้นตอน (พร้อมรูปภาพ)
")
DIY Capacitive Discharge 18650 Spot Battery Welder # 6: นี่คือเครื่องเชื่อมแท็บแบตเตอรี่ที่ 6 ที่ฉันสร้างขึ้นจนถึงปัจจุบัน ตั้งแต่ช่างเชื่อม MOT คนแรกของฉัน ฉันอยากทำสิ่งเหล่านี้และดีใจที่ได้ทำ! อันนี้ฉันตัดสินใจทำกับตัวเก็บประจุ ProTip คือวิธีการสร้างเครื่องเชื่อมแท็บแบตเตอรี่อย่างง่ายจาก
Tree of Life (Arduino Capacitive Touch Sensor ขับเคลื่อนเซอร์โวมอเตอร์): 6 ขั้นตอน (พร้อมรูปภาพ)
: 6 ขั้นตอน (พร้อมรูปภาพ)")
Tree of Life (Arduino Capacitive Touch Sensor Driving Servo Motor): สำหรับโครงการนี้ เราได้สร้างต้นไม้ที่ให้ข้าวซึ่งประกอบด้วยเซ็นเซอร์สัมผัส capacitive และเซอร์โวมอเตอร์ เมื่อสัมผัสแผ่นรอง เซอร์โวมอเตอร์จะทำงานและข้าว (หรืออะไรก็ตามที่คุณต้องการใส่ลงไป) จะถูกปล่อยออกมา นี่คือวิดีโอสั้น ๆ
Capacitive Touch พร้อม Evive (คอนโทรลเลอร์ที่ใช้ Arduino): 6 ขั้นตอน (พร้อมรูปภาพ)
: 6 ขั้นตอน (พร้อมรูปภาพ)")
Capacitive Touch With Evive (ตัวควบคุมจาก Arduino): คุณรู้หรือไม่ว่าหน้าจอสัมผัสของสมาร์ทโฟนของคุณทำงานอย่างไร สมาร์ทโฟนมีเซ็นเซอร์สัมผัสมากมายอยู่ใต้หน้าจอกระจก ปัจจุบันนี้ใช้เทคโนโลยีการตรวจจับการสัมผัสความจุและแม้แต่การสัมผัสที่อ่อนโยนก็ตรวจพบได้ง่าย สัมผัส capacitive สัมผัส