")
สารบัญ:
- เสบียง
- ขั้นตอนที่ 1: การตั้งค่าเครื่องพิมพ์ 3 มิติ
- ขั้นตอนที่ 2: สร้าง Otto DIY+. ของคุณเอง
- ขั้นตอนที่ 3: เขียนโค้ด Otto. ของคุณเอง
- ขั้นตอนที่ 4: รหัสหลักสำหรับ Bluetooth APP
- ขั้นตอนที่ 5: คัดลอก ขยาย ปรับแต่ง แก้ไข รีมิกซ์และแชร์
- ขั้นตอนที่ 6: การตั้งค่า Bluetooth (BT) (เฉพาะเมื่อจับคู่ไม่สำเร็จ):
- ผู้เขียน John Day day@howwhatproduce.com.
- Public 2024-01-30 13:03.
- แก้ไขล่าสุด 2025-01-23 15:12.




ลักษณะโอเพ่นซอร์สอย่างแท้จริงของ Otto ช่วยให้เกิดการศึกษา STEAM แบบเปิด เรารวบรวมข้อเสนอแนะจากเวิร์กช็อปและโรงเรียนต่างๆ ทั่วโลกที่ใช้ Otto DIY ในห้องเรียนอยู่แล้ว และขึ้นอยู่กับการเปิดกว้างของสถานที่การศึกษาแห่งนี้ เราจัดระเบียบเนื้อหาบทเรียนและแบ่งปันเช่นกัน
CC-BY-SA ใบอนุญาตครีเอทีฟคอมมอนส์หมายความว่าคุณสามารถคัดลอกได้ฟรี แต่คุณต้องให้เครดิตกับต้นฉบับโดยใส่เว็บไซต์ของเรา (https://www.ottodiy.com/)
Otto DIY + เป็นเวอร์ชันที่ปรับปรุงและล้ำหน้าของ #OttoDIY ดั้งเดิม แนวคิดคือการมีคุณสมบัติพื้นฐานที่เหมือนกัน หุ่นยนต์ DIY + การควบคุมและการเขียนโปรแกรม Bluetooth + เซอร์โวมอเตอร์เกียร์โลหะ + ชาร์จใหม่ได้ + โหมดเปลี่ยนโดยเซ็นเซอร์สัมผัส + เซ็นเซอร์เสียง + การเคลื่อนที่ของแสง + เอาต์พุตอื่นๆ +…?
ส่วนที่น่าตื่นเต้นคือ เรากำลังดำเนินการพัฒนาแบบเปิดกับผู้สร้างและแฮ็กเกอร์ทั่วโลก ดังนั้นเราจึงเปิดรับแนวคิด ไม่เพียงแต่จากผู้เชี่ยวชาญที่คุณสามารถเข้าร่วมกับเราด้วย ข้อเสนอแนะ การแบ่งปันทางสังคม การทดสอบ หรือการสนับสนุนอื่นๆ ที่คุณอาจนึกถึง
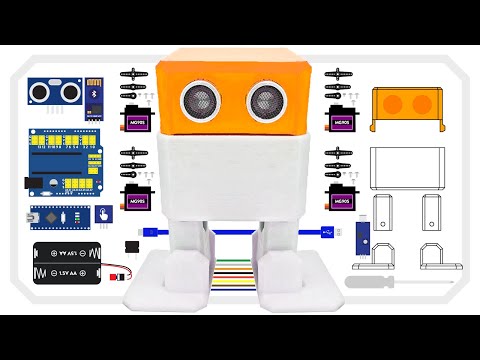
เสบียง
1 × Arduino นาโน
1 × HC-06 หรือ HC-05 โมดูลบลูทูธ
1 × Arduino Nano Shield I/O; คุณสามารถใช้เขียงหั่นขนมขนาดเล็กได้ แต่ใช้สายเคเบิลได้มากกว่า
1 × สาย USB-A เป็น Mini-USB
4 ×ไมโครเซอร์โว MG90s (โลหะ)
1 × Buzzer
10 × สายจัมเปอร์หญิง/หญิง
1 × เซ็นเซอร์สัมผัส
1 × เซ็นเซอร์เสียง
1 × 8x8mm Micro Switch ล็อคตัวเอง เปิด/ปิด
1 × 3.7 V LiPo Battery พร้อมบูสเตอร์ถึง 5V (อุปกรณ์เสริม) 1 × ไขควง Phillips 1 x เครื่องพิมพ์ 3D (หรือใช้บริการหรือเพื่อน;))
ขั้นตอนที่ 1: การตั้งค่าเครื่องพิมพ์ 3 มิติ

สิ่งสำคัญคือต้องอ่านคำสั่ง Otto DIY ก่อนหน้านี้เพื่อทำความคุ้นเคยกับพื้นฐานของการสร้างหุ่นยนต์สองเท้ารับชิ้นส่วนรหัสและไลบรารี STL ของการพิมพ์ 3 มิติทั้งหมดสำหรับ Bluetooth โดยไปที่นี่ https://wikifactory.com/+OttoDIY/otto-diy- บวกในแท็บไฟล์
- แนะนำให้ใช้เครื่องพิมพ์ FDM 3D กับวัสดุ PLA
- ไม่จำเป็นต้องรองรับหรือแพเลย
- ความละเอียด: 0.15mm
- เติมความหนาแน่น 20%
ต้องการปรับขนาดการเปลี่ยนแปลงบางอย่างใช้ไฟล์ต้นฉบับที่สร้างใน Autodesk Fusion 360
หรือทิงเกอร์แคดที่นี่
ขั้นตอนที่ 2: สร้าง Otto DIY+. ของคุณเอง



ในวิดีโอและรูปภาพต่อไปนี้ คุณสามารถอ้างอิงถึงวิธีสร้าง Otto DIY+ เนื่องจากเวอร์ชันใหม่ของการออกแบบหุ่นยนต์
ขั้นตอนที่ 3: เขียนโค้ด Otto. ของคุณเอง





ถึงจุดนี้คุณควรพิมพ์ Otto 3D ประกอบ ตอนนี้บางโปรแกรมมีไลบรารี่และ Arduino ติดตั้งอยู่ในพีซีของคุณ
วิธีที่ง่ายที่สุดในการโค้ด Otto ของคุณเองคือการใช้ซอฟต์แวร์ Blockly ของเรา ตัวเข้ารหัสขั้นสูงสามารถลองใช้ Arduino IDE ได้โดยตรง
ขั้นตอนที่ 4: รหัสหลักสำหรับ Bluetooth APP




อ็อตโตต้องพร้อมที่จะรับคำสั่งผ่านบลูทูธและต้องใส่รหัสหลักไว้ในสมองของเขา
- คัดลอกไลบรารี Otto ลงในโฟลเดอร์ Arduino IDE
- อัปโหลดร่าง APP.ino ไปยัง Otto
- ดาวน์โหลดและติดตั้งแอพในสมาร์ทโฟนของคุณ Google Play Store (https://play.google.com/store/apps/details?id=com.ottodiy)
- ตอนนี้คุณสามารถเชื่อมต่อโมดูลและเปิดใช้งาน Bluetooth ในโทรศัพท์ของคุณ
- ค้นหา Otto และจับคู่ที่อยู่ Bluetooth /name
- ตอนนี้คุณสามารถใช้ APP เพื่อควบคุม Otto!
- เล่นกับคุณสมบัติใหม่และถ้าไม่ คุณอาจต้องกำหนดค่า BT ใหม่ แต่ไม่ต้องกังวลก็ง่ายเช่นกัน;)
ขั้นตอนที่ 5: คัดลอก ขยาย ปรับแต่ง แก้ไข รีมิกซ์และแชร์




ตรวจสอบบล็อกโพสต์นี้เพื่อค้นหาแนวคิดในการปรับแต่งหุ่นยนต์ของคุณเอง
เข้าร่วมชุมชน Otto Builder! ติดตามเรา กดไลค์เรา และแบ่งปันความคิดสร้างสรรค์ของคุณ คุณสามารถแสดงที่นี่ได้ด้วยการแบ่งปันหุ่นยนต์ของคุณในโซเชียลมีเดีย
Facebook และ Instagram
ใช้แฮชแท็ก #ottodiy ในโพสต์และแท็กหรือพูดถึง @OttoDIY
ร่วมเป็นส่วนหนึ่งของชุมชนผู้สร้างหุ่นยนต์ ครู และผู้สร้างหุ่นยนต์ที่เป็นมิตรแห่งนี้! โดยเข้าร่วมกับเราที่นี่ยินดีต้อนรับสู่ชุมชน Otto Builder ของเรา!
ขั้นตอนที่ 6: การตั้งค่า Bluetooth (BT) (เฉพาะเมื่อจับคู่ไม่สำเร็จ):
การตั้งค่านี้จำเป็นสำหรับโมดูลที่ไม่มีอัตราบอดมาตรฐานที่ 9600 เท่านั้น จะรู้ได้อย่างไร? เพียงลองใช้รหัสและแอปก่อน หากโทรศัพท์ไม่จับคู่กับ Otto หรือตอบสนองต่อคำสั่ง อาจหมายความว่าโมดูลของคุณมีอัตรารับส่งข้อมูลที่แตกต่างกัน ดังนั้นจำเป็นต้องกำหนดค่า
รหัส BT มีอัตราบอด 115200 ดังนั้นโมดูล BT จะต้องตรงกับความเร็วนั้นจึงจะสามารถสื่อสารกับ Arduino Nano ผ่านอินเทอร์เฟซแบบอนุกรม (UART)
สำหรับ HC-05: 38400 หรือ 115200
1. อัปโหลดภาพสเก็ตช์ HC05_BT_config.ino ไปยัง Nano ของคุณก่อน จากนั้นจึงถอด Nano ออกจาก USB
2. ตอนนี้เชื่อมต่อ BT กับ Arduino Nano ตามที่แสดงในแผนภาพ แต่ไม่ต้องเชื่อมต่อ VCC
TX - RX
RX - TX
VCC - 5V
GND - GND
3. เสียบ USB เข้ากับ Nano แล้วเชื่อมต่อ VCC เพื่อให้ BT เข้าสู่โหมด AT LED บน BT ควรเริ่มกะพริบช้าลงประมาณทุกๆ 2 วินาที (หากไม่ได้ผล ให้ลองกดปุ่มบนโมดูล BT ค้างไว้ขณะเชื่อมต่อ VCC)
เปิดมอนิเตอร์แบบอนุกรมใน IDE ตั้งค่าอัตราบอดเป็น 9600 และสิ้นสุดบรรทัดเป็นทั้ง NL & CR
พิมพ์ AT แล้วกด Enter; (หากทุกอย่างถูกต้อง BT ควรตอบสนองด้วย OK จากนั้นป้อนคำสั่งต่อไปนี้:
AT+NAME=Zowi "การตั้งชื่อ"
AT+PSWD=1234 "รหัสผ่านการจับคู่"
AT+UART=115200, 1, 0 "อัตราบอด"
AT+POLAR=1, 0 "เปิดใช้งาน STATE pin เพื่อใช้รีเซ็ตสำหรับการเขียนโปรแกรม arduino ผ่าน BT"
ไปที่ขั้นตอนแอป
หากมีปัญหาใด ๆ ให้ตรวจสอบคำแนะนำเกี่ยวกับวิธีการปรับเปลี่ยนค่าเริ่มต้นของโมดูล Bluetooth HC-05 โดยใช้คำสั่ง AT
www.instructables.com/id/Modify-The-HC-05-…
สำหรับ HC-06: 9600 หรือ 115200
สำหรับโมดูล HC-06 BT นั้นง่ายกว่าเล็กน้อยเพราะโมดูลอยู่ในโหมดคำสั่ง AT เสมอเมื่อไม่ได้เชื่อมต่อกับสิ่งใด แต่ข้อเสียคือไม่สามารถใช้โมดูล HC-06 เพื่ออัปโหลดภาพร่างไปยัง Arduino ได้เนื่องจากไม่มีการรีเซ็ต สำหรับการกำหนดค่าโมดูล
1. อัปโหลดภาพสเก็ตช์ HC06_BT_config.ino ไปยัง Nano. ของคุณ
1. ถอดสาย USB
2. เชื่อมต่อโมดูล BT กับ Arduino Nano ดังนี้:
TX - RX
RX - TX
VCC - 5V
GND - GND
3. เปิดเครื่องนาโนของคุณและหลังจากนั้นประมาณ 10-15 วินาที ทุกอย่างจะเสร็จสิ้น และควรกำหนดค่า BT ของคุณ (LED13 ควรเริ่มกะพริบ)
หากมีปัญหาใด ๆ ตรวจสอบคำแนะนำนี้
หากมีคำถามใด ๆ ฉันไม่ได้รับการแจ้งเตือนจากความคิดเห็นใหม่ที่สอนได้ ดังนั้นหากมีสิ่งใดโปรดโพสต์ในชุมชนของเรา
แนะนำ:
หุ่นยนต์ Quadruped ขับเคลื่อนด้วย Arduino ที่พิมพ์ 3 มิติ: 13 ขั้นตอน (พร้อมรูปภาพ)
")
หุ่นยนต์ Quadruped ที่ขับเคลื่อนด้วย Arduino แบบพิมพ์ 3 มิติ: จาก Instructables ก่อนหน้านี้ คุณอาจเห็นว่าฉันมีความสนใจอย่างมากสำหรับโครงการหุ่นยนต์ หลังจากคำสั่งสอนก่อนหน้านี้ที่ฉันสร้างหุ่นยนต์สองเท้า ฉันตัดสินใจลองทำหุ่นยนต์สี่ขาที่สามารถเลียนแบบสัตว์เช่นสุนัข
GorillaBot หุ่นยนต์ Quadruped ของ Arduino Autonomous Sprint ที่พิมพ์ 3 มิติ: 9 ขั้นตอน (พร้อมรูปภาพ)
")
GorillaBot หุ่นยนต์ Arduino Autonomous Sprint Quadruped Robot ที่พิมพ์ 3 มิติ: ทุกปีในตูลูส (ฝรั่งเศส) มีการแข่งขันหุ่นยนต์ตูลูส # TRR2021 การแข่งขันประกอบด้วยการวิ่งอัตโนมัติ 10 เมตรสำหรับหุ่นยนต์สองขาและสี่เท่า สถิติปัจจุบันที่ฉันรวบรวมสำหรับสัตว์สี่เท้าคือ 42 วินาทีสำหรับ วิ่ง 10 เมตร ดังนั้นในม
เครื่องส่งสัญญาณ RC จาก Arduino แบบ 3 มิติ: 25 ขั้นตอน (พร้อมรูปภาพ)
")
เครื่องส่งสัญญาณ RC แบบใช้ Arduino แบบพิมพ์ 3 มิติ: โครงการนี้จะแสดงให้คุณเห็นว่าฉันออกแบบและสร้างเครื่องส่งสัญญาณ RC ที่ใช้ Arduino ได้อย่างไร เป้าหมายของฉันสำหรับโครงการนี้คือการออกแบบเครื่องส่งสัญญาณ RC แบบพิมพ์ได้ 3 มิติที่ฉันสามารถใช้ควบคุมโครงการ Arduino อื่น ๆ ได้ ฉันต้องการให้คอนโทรลเลอร์เป็น
แป้นพิมพ์มาโคร Arduino พิมพ์ 3 มิติ: 6 ขั้นตอน (พร้อมรูปภาพ)
")
แป้นพิมพ์มาโคร Arduino ที่พิมพ์ 3 มิติ: นี่เป็นโครงการแรกของฉันที่ทำงานกับ Arduino Pro Micro คุณสามารถใช้ในแชท Zoom หรือ Discord เพื่อทำสิ่งต่างๆ เช่น สลับปิดเสียง สลับวิดีโอ หรือแชร์หน้าจอ ยิ่งไปกว่านั้น คุณสามารถตั้งโปรแกรมให้เปิดโปรแกรมที่ใช้บ่อยบน
กระถางต้นไม้อัจฉริยะอัตโนมัติ - (DIY, พิมพ์ 3 มิติ, Arduino, รดน้ำด้วยตัวเอง, โครงการ): 23 ขั้นตอน (พร้อมรูปภาพ)
: 23 ขั้นตอน (พร้อมรูปภาพ)")
กระถางต้นไม้อัจฉริยะอัตโนมัติ - (DIY, 3D Printed, Arduino, Self Watering, Project): สวัสดี บางครั้งเมื่อเราออกจากบ้านสักสองสามวันหรือยุ่งมาก ต้นไม้ในบ้าน (อย่างไม่ยุติธรรม) ต้องทนทุกข์เพราะไม่ได้รดน้ำเมื่อพวกเขา ต้องการมัน. นี่คือวิธีแก้ปัญหาของฉัน มันเป็นกระถางต้นไม้อัจฉริยะซึ่งรวมถึง: อ่างเก็บน้ำในตัว เซนโซ