")
สารบัญ:
- ผู้เขียน John Day day@howwhatproduce.com.
- Public 2024-01-30 13:04.
- แก้ไขล่าสุด 2025-01-23 15:12.



เฮ้พวก..
คุณเคยเดินเตร็ดเตร่เพื่อสร้างกระดานเขาวงกตที่ควบคุมได้จากสมาร์ทโฟน Android ของคุณหรือไม่….!
คุณมาถูกที่แล้ว ฉันสร้างมันขึ้นมาสำหรับตัวเองโดยใช้ Arduino และ Android
ไม่ต้องกังวล มันง่าย,.. ในโครงการนี้ฉันจะแสดงวิธีทำ:
1. กระดานเขาวงกต (ผมทำจากกล่องไม้เก่าๆ วางอยู่รอบๆ)
2. แอพ Android ใน App Inventor สำหรับควบคุมบอร์ด
3. เขียนโปรแกรม Arduino สำหรับควบคุมบอร์ดและ
4. การตั้งวงจร ….
ภายหลังคุณสามารถใช้แนวคิดที่เรียนรู้ในโครงการอื่นที่คุณจะสร้าง..
เพื่อไม่ให้เป็นการเสียเวลา เรามาเริ่มกันเลย….!
ขั้นตอนที่ 1: รวบรวมส่วนประกอบ



สำหรับโครงการนี้ คุณจะต้องมีรายการต่อไปนี้:
1. เซอร์โวมอเตอร์สองตัว (ฉันใช้ตัวมินิและใช้งานได้สำหรับฉัน)
2. Arduino Uno. (ฉันแนะนำให้ซื้อจาก snapdeal มันเป็นโคลน แต่คุ้มค่าทุกเพนนีที่ฉันใช้ไป)
3. โมดูลบลูทูธ
4. เขียงหั่นขนม
5. สายจัมเปอร์บางส่วน
6. แผ่นไม้บางหรือแข็ง
7. ตะปู แป้นคีย์บอร์ดเก่าๆ
8. เทอร์โมคอล (โพลีสไตรีน)
ขั้นตอนที่ 2: การสร้างกระดานเขาวงกต



ซึ่งเป็นส่วนกลไกของโครงการ..
ขั้นแรกให้นำแผ่นไม้หรือกระดาษแข็งสี่เหลี่ยมผืนผ้ายาวสำหรับฐาน ต้องใหญ่กว่ากระดานเอียงจริง..
ตัดไม้ทรงลูกบาศก์ขนาดเล็กสองอันเท่ากัน..
และตอกตะปูลงไปทีละอัน เพื่อให้พวกมันอยู่สูงเท่ากันจากฐาน ตัดไม้พิเศษมาเสริมเสาด้วย..
ตอนนี้สำหรับกระดานด้านบน..
ทำกรอบให้เล็กกว่าฐาน นี่จะเป็นแกน x ของเรา ที่ขอบด้านนอกของขอบที่เล็กกว่าของเฟรม ทำรูเล็กๆ ตรงกึ่งกลางขอบพอดี ตัดท่อนไม้เป็นครึ่งแล้วติดเข้ากับขอบขนาดใหญ่ของกรอบหันเข้าด้านใน ผ่าครึ่งก่อนทำ
สิ่งนี้จะยึดกระดานบนเข้ากับเฟรมและช่วยในการหมุน
ตอนนี้เพิ่มเสาเข้ากับรูด้านนอกเพื่อให้โครงยืนบนฐาน
ติดเสาเข้ากับฐานและติดส่วนรองรับไว้ด้วย
ตอนนี้เพื่อเพิ่มเซอร์โวมอเตอร์
หนึ่งจะติดกับฐานและจะติดกับเฟรมโดยใช้แกนเล็ก ๆ เพื่อหมุนเฟรม
อีกอันจะติดกับเฟรมและจะติดกับบอร์ดด้านบนโดยใช้แท่งเล็ก ๆ เพื่อหมุนกระดานด้านบน
ควรติดตั้งเซอร์โวในแนวตั้งฉากกันตามที่แสดงในภาพ
ตอนนี้บอร์ดพร้อมแล้ว
ฉันสร้างเขาวงกตโดยใช้เทอร์โมคอลและกระดานการ์ด
ขั้นตอนที่ 3: การตั้งค่าวงจร

ตั้งค่าวงจรตามภาพ …
โปรดจำไว้ว่าสำหรับเซอร์โวฉันกำลังใช้สายสีแดงเป็นค่าบวก สีน้ำตาลคือค่าลบ และสีส้มคือสัญญาณ
โมดูลบลูทูธ
Rx ไปที่พิน 1
Tx ไปที่พิน 0
สายสัญญาณของเซอร์โวฐานไปที่พิน 5
สายสัญญาณของเซอร์โวเฟรมไปที่พิน 6
อย่าลืมเพิ่มแหล่งจ่ายไฟเพิ่มเติมสำหรับโมดูลเซอร์โวและบลูทู ธ โมดูลที่ชาญฉลาดอื่น ๆ จะไม่ได้รับกระแสเพียงพอและจะตัดการเชื่อมต่อต่อไปโดยแสดงข้อผิดพลาด 516 ฉันมีปัญหามากมายในการแก้ไขปัญหาและในที่สุดก็หาปัญหาและวิธีแก้ปัญหา
ขั้นตอนที่ 4: การสร้างแอป

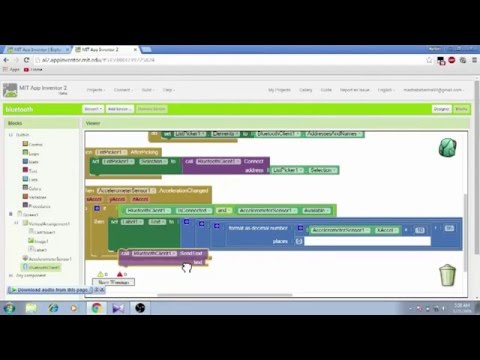

โอเค ก่อนอื่นคุณต้องลงชื่อเข้าใช้ mit app inventor เพื่อสร้างแอปใดๆ..
ไปที่
และคลิกที่สร้างแอป! ซึ่งอยู่มุมขวาบน ลงทะเบียน และคุณพร้อมที่จะไป….
ทุกสิ่งทุกอย่างที่ฉันได้แสดงในวิดีโอ.. ได้ดู.
นี่คือพื้นฐาน:
เมื่อหน้าจอเริ่มต้นในแอพ (ซึ่งในกรณีนี้คือ Screen1)
- เซ็นเซอร์ความเร่งถูกเปิดใช้งานและความไวถูกตั้งค่าเป็นสูงสุดเช่น 3
ตอนนี้เมื่อเรากดตัวเลือกรายการ
- รายการปรากฏขึ้นพร้อมรายการอุปกรณ์ที่จับคู่
(คุณจะต้องจับคู่โมดูลก่อนเปิดแอป ตามปกติรหัสคู่คือ 1234)
ตอนนี้ก่อนที่จะเลือกเครื่องมือเลือกรายการ
-ตั้งค่ารายการด้วยอุปกรณ์ที่จับคู่และที่อยู่
หลังจากที่คุณเลือกอุปกรณ์
- อะแดปเตอร์บลูทูธจะเชื่อมต่อกับอุปกรณ์ที่เลือก
ตอนนี้เชื่อมต่อโมดูลแล้ว
เมื่อมีการเปลี่ยนแปลงข้อมูลเซ็นเซอร์ความเร่ง
- เพิ่มข้อมูลลงในข้อความป้ายกำกับและส่งด้วยบลูทูธส่ง
ตอนนี้ส่วนที่ยุ่งยากคือการส่งข้อมูลสองครั้ง
# ข้อมูลมาตรความเร่งมีตั้งแต่ 0 ถึง 9.5 เมื่อเอียงซ้าย และ 0 ถึง -9.5 เมื่อเอียงไปทางขวา
เช่นเดียวกันเมื่อเอียงโทรศัพท์ด้านล่างและหอผู้ป่วย..
ดังนั้นเราจึงมีข้อมูลการเอียงแกน x และ y ที่เราจำเป็นต้องส่ง …
ให้ข้อมูลของแกน x เป็นแกน X และแกน y เป็น Y
ดังนั้นสิ่งที่ฉันทำคือ:
Text="(X*10(ลบจุดทศนิยมหลังจากนั้น)+95)*1000(คูณด้วย 1000)+Y*10(ลบจุดทศนิยม)+95"
ดังนั้นตอนนี้ข้อมูลอยู่ในช่วงตั้งแต่ 0 ถึง 190 สำหรับแต่ละแกนและถูกเพิ่มเพื่อสร้าง 190180 โดยที่ 3 หลักแรกคือแกน x และ 3 สุดท้ายคือพิกัดแกน y …
ซึ่งจะถูกส่งไปยังโมดูลบลูทูธและจะแยกย่อยเป็นข้อมูลจริงและแผนที่ด้วยมุมการหมุนของเซอร์โวในโค้ด Arduino…
ขั้นตอนที่ 5: การเขียนโค้ด Arduino


หลังจากแอปเสร็จแล้วให้เริ่มด้วยโค้ด ฉันได้อัปโหลดโค้ดแล้ว ดาวน์โหลด คอมไพล์และส่งไปที่ Arduino แต่รอก่อนที่คุณจะส่งรหัส ให้แยกหมุด rx และ tx ของโมดูล bluettoh ออกจากบอร์ด arduino.. และส่งรหัส หลังจากนี้คุณสามารถติดหมุดกลับ..
รหัสที่ได้รับจากบลูทู ธ เป็นสตริงที่มีข้อมูลแกนของเรา..
ตอนนี้ Serial.parseInt(); ใช้ในการอ่านสตริงและแปลงสตริงเป็น int ในตัวแปร pos
ตอนนี้ pos มีค่า = 190180 (พูด) เป้าหมายของเราคือตอนนี้เพื่อถอดรหัสข้อมูลเช่นลบแกน x และพิกัด y
สำหรับแกน x หารค่าด้วย 1000 จะได้ค่า 190.i.e/1000 = 190
และสำหรับโมดูลาร์แกน y ให้หารค่าด้วย 1000 ซึ่งจะให้ค่า 180 เช่นค่า%1000 = 180. แก่เรา
ตอนนี้คำนวณตำแหน่งสูงสุดและต่ำสุดของเซอร์โวที่คุณต้องการสำหรับการเอียงบอร์ด … ในกรณีของฉันคือ 180 และ 75 และ….
ตอนนี้เราได้แกน x และ y ที่ประสานกัน ตอนนี้เราแค่ต้องทำแผนที่พิกัดด้วยมุมการหมุนต่ำสุดและสูงสุดที่เราต้องการสำหรับเซอร์โวของเรา ….
ดูรหัสสำหรับรายละเอียด
และเสร็จแล้ว … อัปโหลดรหัส เปิดแอปเชื่อมต่อและเล่น….
คุณรู้หรือไม่ว่า google ได้สร้างขึ้นมาเพื่อตัวเองและเป็นเขาวงกตขนาดใหญ่มากที่คุณเคยเห็นมา… ซึ่งเป็นแรงจูงใจของฉันในการสร้างมันขึ้นมาสำหรับตัวฉันเอง
คราวหน้าขอให้สนุกนะ..
แนะนำ:
เกม 3d Maze โดยใช้ Arduino: 8 ขั้นตอน (พร้อมรูปภาพ)
")
เกม 3d Maze ที่ใช้ Arduino: สวัสดีเพื่อนๆ ดังนั้นวันนี้เราจะมาสร้างเกมเขาวงกตโดยใช้ ARDUINO UNO เนื่องจาก Arduino Uno เป็นบอร์ดที่ใช้กันเป็นส่วนใหญ่ มันจึงเจ๋งมากที่จะสร้างเกมด้วย ในคำแนะนำนี้ ให้สร้างเกมเขาวงกตที่ควบคุมโดยใช้จอยสติ๊ก อย่าลืม
เกม Arduino Sorta Sudoku: 3 ขั้นตอน (พร้อมรูปภาพ)
")
เกม Arduino Sorta Sudoku: ผู้คนจำนวนมากชอบเล่น Sudoku และหลานๆ ชอบเดาเกม ดังนั้นฉันจึงตัดสินใจสร้างเกม "Sorta Sudoku" แบบพกพา ในเวอร์ชันของฉัน เกมเป็นตารางขนาด 4x4 แต่มีให้เพียงหมายเลขเดียวเท่านั้น แนวความคิดคือการเดาตัวเลขที่เหลือใน
กดปุ่ม); // เกม Arduino LCD: 5 ขั้นตอน (พร้อมรูปภาพ)
; // เกม Arduino LCD: 5 ขั้นตอน (พร้อมรูปภาพ)")
กดปุ่ม); //เกม Arduino LCD: เมื่อเร็ว ๆ นี้ใน Scouts ฉันทำงานเกี่ยวกับตราสัญลักษณ์การออกแบบเกม สำหรับข้อกำหนดข้อใดข้อหนึ่ง ฉันสร้างเกมนี้โดยใช้ Arduino ที่อิงจากเกม LED Rocker จุดประสงค์ของเกมคือทำคะแนนให้ได้มากที่สุด ในช่วงเริ่มต้นของเ
เกม Arduino จอแสดงผล LED แบบอินไลน์: 7 ขั้นตอน (พร้อมรูปภาพ)
")
เกม Arduino จอแสดงผล LED แบบอินไลน์: หรือที่รู้จักว่าระบบเกมแสดงบันได LED Attiny-85 ที่ติดตั้งฮาร์ดแวร์และซอฟต์แวร์เพื่อเล่นแอ็กชัน "วิดีโอ" เกมบนจอแสดงผล LED แบบอินไลน์ มีจอแสดงผลแลดเดอร์ LED 12 ดวงแบบมัลติเพล็กซ์ และรองรับอินพุตปุ่มสูงสุด 6 ปุ่มและออปติ
เกม Arduino Wire: 7 ขั้นตอน (พร้อมรูปภาพ)
")
เกม Arduino Wire: สำหรับโปรเจ็กต์นี้ ฉันอ้างอิงจากเว็บไซต์นี้ และเปลี่ยนเพื่อสร้างโปรเจ็กต์ใหม่ โปรเจ็กต์นี้เรียกว่าเกม Wire ซึ่งคุณจะจับที่จับโลหะและทำให้มันทะลุลวดโดยไม่ต้องสัมผัสลวด หากที่จับสัมผัสลวด