")
สารบัญ:
- ขั้นตอนที่ 1: การเข้ารหัส Raspberry Pis
- ขั้นตอนที่ 2: การตั้งค่าเซิร์ฟเวอร์กล้อง
- ขั้นตอนที่ 3: การตัดด้วยเลเซอร์และการพิมพ์ 3 มิติ
- ขั้นตอนที่ 4: การเชื่อมต่อและทดสอบ Raspberry Pis
- ขั้นตอนที่ 5: เตรียมโครงสร้างและวงจรไฟฟ้า
- ขั้นตอนที่ 6: สร้างโครงสร้างและวงจรไฟฟ้า
- ขั้นตอนที่ 7: ถ่ายภาพ
- ขั้นตอนที่ 8: ประมวลผลภาพถ่ายเป็นโมเดล 3 มิติ
- ผู้เขียน John Day day@howwhatproduce.com.
- Public 2024-01-30 13:07.
- แก้ไขล่าสุด 2025-01-23 15:12.


สแกนเนอร์ 3 มิตินี้เป็นโครงการความร่วมมือที่ BuildBrighton Makerspace โดยมีเป้าหมายเพื่อทำให้เทคโนโลยีดิจิทัลมีราคาไม่แพงสำหรับกลุ่มชุมชน มีการใช้เครื่องสแกนในอุตสาหกรรมแฟชั่น เพื่อปรับแต่งการออกแบบเสื้อผ้า ในอุตสาหกรรมเกมสำหรับความเป็นจริงเสมือน และในโรงยิมเพื่อตรวจสอบสุขภาพ หากมีให้บริการในพื้นที่ผู้สร้างซึ่งให้การเข้าถึงเครื่องมือสำหรับการผลิต นวัตกรรมทางสังคมก็อาจมีศักยภาพมากขึ้น
ฉันจะใช้เครื่องสแกนเพื่อช่วยในการออกแบบเสื้อผ้า ในการเริ่มต้น ฉันได้ตัดโมเดลของฉันโดยใช้ซอฟต์แวร์ฟรี และเลเซอร์ตัดหุ่นช่างตัดเสื้อออกจากกระดาษแข็งซึ่งเป็นรูปร่างส่วนตัวของฉัน ต่อไป ฉันวางแผนที่จะดูว่าเสื้อผ้ามีลักษณะอย่างไรในโมเดล 3 มิติใน VR ก่อนที่ฉันจะทำมัน
Santander มอบเงินสนับสนุน 1,000 ปอนด์ให้ฉันเพื่อสร้างเครื่องสแกนในฐานะรางวัล University of Brighton Digital เราใช้เงินมากกว่านั้นในการสร้างต้นแบบตัวเลือกต่างๆ แต่ในบทสรุปการออกแบบของเรา เราได้ตรวจสอบให้แน่ใจว่าเวอร์ชันสุดท้ายสามารถทำซ้ำได้ภายในงบประมาณนั้น ในราคานั้น กลุ่มชุมชนอื่นๆ อาจสามารถระดมทุนเพื่อสร้างสิ่งที่คล้ายกันได้
โปรดทราบ: โปรเจ็กต์นี้ใช้ไฟฟ้าหลักและต้องใช้ความรู้ด้านการเดินสายไฟ ดังนั้นเพื่อความปลอดภัย ส่วนต่างๆ เกี่ยวกับการสร้างเครื่องสแกนจะแสดงสิ่งที่เราทำ โดยมีระดับของรายละเอียดสำหรับอ้างอิงมากกว่าการคัดลอก และส่วนเกี่ยวกับการเข้ารหัสและการใช้ สแกนเนอร์เขียนเป็นคู่มือ 'วิธีการ' เป็นโครงการที่กำลังดำเนินอยู่ ดังนั้นฉันจึงหวังว่าจะสามารถจัดเตรียมแผนเต็มรูปแบบสำหรับเวอร์ชันแบตเตอรี่ได้ในไม่ช้า ตรวจสอบเว็บไซต์ของฉันหรือติดต่อฉันหากคุณต้องการทราบข้อมูลเพิ่มเติม
ด้วยเหตุผลด้านสิ่งแวดล้อม เราจึงเลือก PLA สำหรับตัวเชื่อมต่อที่พิมพ์ 3 มิติและหลอดกระดาษแข็งสำหรับโครงสร้าง กระดาษแข็งสามารถเปลี่ยนรูปร่างได้ง่ายหากชิ้นส่วนไม่พอดี จึงเป็นเครื่องมือสร้างต้นแบบที่ยอดเยี่ยม และที่ความหนา 3 มม. หลอดจะแข็งแรงและแข็ง
การทำงานในโครงการความร่วมมือครั้งนี้ยอดเยี่ยมมาก ขอบคุณ Arthur Guy ที่เขียนโค้ดและสมาชิกคนอื่นๆ ของ BuildBrighton ที่มาช่วยเหลือในเย็นวันพุธ หรือปรากฏขึ้นเมื่อใดก็ตามที่พวกเขาต้องการ
วัสดุสำหรับโครงการนี้คือ:
27 Raspberry Pi Zero W
27 โมดูลกล้อง Raspberry Pi
27 Raspberry Pi zero สายกล้อง
สาย USB to Micro USB จำนวน 27 เส้น
20 หลอดกระดาษแข็ง ยาว 125 ซม. x เส้นผ่านศูนย์กลาง 32 มม. มีแกนเส้นผ่านศูนย์กลาง 29 มม.
8 ฝาท้ายสำหรับท่อ
เส้นใยการพิมพ์ PLA 3D
8 ฝาจากถังเบียร์แบบใช้แล้วทิ้ง
2 x A3 แผ่นไม้อัดเบิร์ชคุณภาพเลเซอร์ 3 มม
ตัวแปลงไฟ 230v-12v (เนื่องจากไฟหลักเป็น 230v ในสหราชอาณาจักร)
ตัวควบคุมพลังงาน CRT 5v 12 ตัว
ฟิวส์ใบมีด 3 x 30 แอมป์และตัวยึด
สายไฟฟ้า
กล่องต่อสายคันโยก 2, 3 และ 5 ตัว
50 Ferrules
เราเตอร์เคเบิลโมเด็ม
สายอีเธอร์เน็ต
การ์ด SD 27 การ์ด (16GB)
การ์ดลูกฟูกชั้นเดียว 5 มม.
Velcro® แบบมีกาวในตัว 2 ม
4 x ก้อนแบตเตอรี่ USB
เครื่องมือที่เราใช้คือ:
คอมพิวเตอร์ Apple® (ซอฟต์แวร์เซิร์ฟเวอร์กล้องเขียนขึ้นสำหรับระบบปฏิบัติการ Apple® แต่อาจทำงานบน Linux ด้วย)
คอมพิวเตอร์พีซีเนื่องจาก Autodesk Remake™ หยุดให้การสนับสนุนผู้ใช้ Mac ในระหว่างโปรเจ็กต์นี้
อินเทอร์เน็ต (แบบมีสายและไร้สาย)
เวอร์ชันฟรีของ Autodesk Remake™
เครื่องพิมพ์ 3 มิติ
เครื่องตัดเลเซอร์
ปลอกรัดจีบ
เครื่องตัดสาย
เลื่อยฉลุและเลื่อยสายพาน
เครื่องขัด
ขั้นตอนที่ 1: การเข้ารหัส Raspberry Pis
ขั้นตอนนี้ต้องใช้ความรู้เกี่ยวกับการเข้ารหัสด้วย Raspberry Pi
ติดตั้งระบบปฏิบัติการ Raspbian รุ่น Lite บน Raspberry Pi แต่ละรุ่น และเปิดใช้งานกล้องและ SSH
ซอฟต์แวร์ nodejs ได้รับการติดตั้งไว้ล่วงหน้าบน Raspbian แต่อาจเป็นเวอร์ชันที่ล้าสมัย
คำสั่งต่อไปนี้จะอัปเกรด หมายเหตุ: Instructables® จะย่อไฮเปอร์ลิงก์ในบรรทัดที่สองโดยอัตโนมัติ ลิงค์แบบเต็มสำหรับการคัดลอกโค้ดสามารถพบได้โดยคลิกที่มัน
กำลังอัปเกรดเป็นโหนด v7
cd ~wget https://nodejs.org/dist/v7.9.0/node-v7.9.0-linux-… tar -xvf node-v7.9.0-linux-armv6l.tar.gz cd node-v7.9.0-linux -armv6l/ sudo cp -R * /usr/local/ sudo reboot # จัดระเบียบซีดี ~ rm node-v7.9.0-linux-armv6l.tar.gz.gz rm -r node-v7.9.0-linux-armv6l.tar.gz # อัปเดต NPM sudo npm ติดตั้ง -g npm
หลังจากติดตั้ง nodejs แล้ว ให้อัปโหลดไฟล์สำหรับซอฟต์แวร์ไคลเอ็นต์:
cd ~git โคลน
จากนั้นติดตั้งซอฟต์แวร์โดยใช้คำสั่งต่อไปนี้:
cd 3dCamera
npm ติดตั้ง
ทดสอบซอฟต์แวร์โดยเรียกใช้โดยใช้คำสั่งต่อไปนี้:
โหนด app.js
ให้ซอฟต์แวร์ทำงานต่อไป
การเริ่มต้นซอฟต์แวร์และทำให้มันทำงานต่อไปเป็นหน้าที่ของ 'หัวหน้างาน' โปรแกรมนี้ทำให้แน่ใจว่าซอฟต์แวร์กล้องทำงานตลอดเวลา และติดตั้งโดยใช้คำสั่งต่อไปนี้:
sudo apt-get ติดตั้ง git Supervisor
หัวหน้างานได้รับการตั้งค่าด้วยแอปพลิเคชันสแกนเนอร์ 3 มิติโดยคัดลอกไฟล์ปรับแต่งที่ให้มาไปยังตำแหน่งสุดท้ายโดยใช้คำสั่งต่อไปนี้:
cp /home/pi/3dCamera/camera.conf /etc/supervisor/conf.d/camera.conf
วิธีแจ้งผู้บังคับบัญชาให้ระบุไฟล์กำหนดค่าใหม่และเริ่มดำเนินการ:
sudo Supervisorctl อ่านซ้ำ
sudo Supervisorctl อัปเดต sudo service Supervisor เริ่มใหม่
หลังจากนั้น เมื่อใดก็ตามที่ระบบเริ่มทำงาน 'ผู้ดูแล' จะเริ่มแอปพลิเคชันกล้องซึ่งเชื่อมต่อกับซอฟต์แวร์เซิร์ฟเวอร์โดยอัตโนมัติ
อุปกรณ์เสริมพิเศษ
ซอฟต์แวร์สามารถอัปเดตได้โดยใช้คำสั่งอัปเดตที่มีอยู่ในอินเทอร์เฟซผู้ใช้บนเว็บ อีกทางเลือกหนึ่งคือบังคับให้อัปเดตทุกครั้งที่ Raspberry Pi เริ่มทำงาน ในการดำเนินการนี้ ให้แทนที่สคริปต์เริ่มต้นเริ่มต้นด้วยสคริปต์ที่จะดำเนินการอัปเดต:
cp /home/pi/3dCamera/rc.local /etc/rc.local
ขั้นตอนที่ 2: การตั้งค่าเซิร์ฟเวอร์กล้อง

ซอฟต์แวร์เซิร์ฟเวอร์เครื่องสแกนเป็นแอปพลิเคชันโหนดที่ต้องใช้ nodejs ไคลเอ็นต์ยังเรียกใช้โหนดและเชื่อมต่อกับเซิร์ฟเวอร์โดยใช้ websockets
ติดตั้ง
ตรวจสอบโหนดกำลังทำงานโดยเปิดหน้าต่าง Terminal แล้วพิมพ์:
โหนด -v
หากไม่ได้ติดตั้งโหนดไว้ สามารถดาวน์โหลดได้จาก NodeJS
ดาวน์โหลดไฟล์
ต้องดาวน์โหลดที่เก็บนี้ไปยังโฟลเดอร์บนคอมพิวเตอร์ สามารถทำได้โดยใช้คำสั่งต่อไปนี้:
โคลน gitติดตั้งการพึ่งพา
สิ่งเหล่านี้ต้องอยู่ในโฟลเดอร์ใหม่ที่มีรหัสที่ดาวน์โหลด:
cd 3dCameraServer
npm ติดตั้ง
ในที่สุดเรียกใช้รหัส
แอปพลิเคชันเซิร์ฟเวอร์ควรเริ่มต้นโดยใช้คำสั่งด้านล่าง ซึ่งจะเริ่มต้นเซิร์ฟเวอร์ websocket บนพอร์ต 3000 และเว็บเซิร์ฟเวอร์บนพอร์ต 8080
โหนดเซิร์ฟเวอร์ js
หากทุกอย่างสำเร็จ ข้อความ 'แอปกล้อง 3D กำลังฟังพอร์ต 8080 และ 3000' จะปรากฏขึ้น หากต้องการใช้แอปพลิเคชัน ให้เปิดเบราว์เซอร์และใช้ URL ต่อไปนี้
การใช้ระบบ
เซิร์ฟเวอร์ใช้ที่อยู่ IP คงที่ซึ่งเป็นวิธีที่กล้องรู้ว่าจะส่งภาพถ่ายไปที่ใด
ซอฟต์แวร์ไคลเอนต์คาดว่าจะเชื่อมต่อกับเซิร์ฟเวอร์บนที่อยู่ IP 192.168.10.100 เราใช้เราเตอร์เฉพาะที่มีการจัดสรรที่อยู่ IP แบบคงที่ แต่หากต้องการใช้เครื่องสแกนโดยไม่มีเครื่องสแกน จำเป็นต้องตั้งค่าที่อยู่ IP นี้ด้วยตนเอง เพื่อลดความซับซ้อนของสิ่งต่าง ๆ ให้ตั้งค่าที่อยู่ mac ของคอมพิวเตอร์บนเราเตอร์เพื่อให้ได้รับที่อยู่ IP ที่ระบุโดยอัตโนมัติ
เราเตอร์เป็นเคเบิลโมเด็ม (ไม่ใช่เราเตอร์ ADSL) สิ่งนี้ทำให้กล้องมีอยู่ แต่ยังช่วยให้พวกเขาเชื่อมต่ออินเทอร์เน็ตเพื่อดึงข้อมูลอัพเดตซอฟต์แวร์ ต้องเปลี่ยนช่วง DHCP ของเราเตอร์จากค่าเริ่มต้น ดังนั้นจะกำหนดที่อยู่ IP ในช่วง 192.168.10.1 - 192.168.10.255
เมื่อลูกค้าออนไลน์ ข้อความการเชื่อมต่อจะปรากฏในหน้าต่างเทอร์มินัลและในหน้าต่างเบราว์เซอร์
เมื่อลูกค้าเชื่อมต่อแล้ว พวกเขาสามารถสั่งให้ถ่ายภาพโดยใช้ปุ่ม 'ถ่ายภาพ' ในส่วนหัว ซึ่งจะเริ่มกระบวนการถ่ายภาพ และภายใน 30 วินาที พวกเขาควรจะส่งภาพทั้งหมดกลับไปยังคอมพิวเตอร์ สิ่งเหล่านี้จะแสดงในเบราว์เซอร์และบันทึกลงในโฟลเดอร์ในไดเร็กทอรีการติดตั้ง ซึ่งอยู่โดยการค้นหาโฟลเดอร์ 3dCameraServer
รหัสที่คว้ามาจาก GitHub มีรูปภาพที่สร้างไว้ล่วงหน้าซึ่งจะพยายามเชื่อมต่อกับเครือข่าย wifi ที่ชื่อ 3DScanner รหัสผ่านสำหรับสิ่งนี้คือ: poppykalayana
ขั้นตอนที่ 3: การตัดด้วยเลเซอร์และการพิมพ์ 3 มิติ




เคส Raspberry Pi เลเซอร์ตัด
เราดาวน์โหลดไฟล์ด้านล่างและตัดออก:
27 x Pi กรณีใช้กระดาษลูกฟูกผนังเดียว 5 มม. เราไม่ใช้กระดาษแข็งที่มีผนังสองชั้นเพราะมีโอกาสเกิดไฟไหม้ได้ภายใต้เลเซอร์
ตัวเชื่อมต่อหลอดการพิมพ์ 3 มิติ
เราพิมพ์ไฟล์ 3 มิติด้านล่าง: 8 x Cross Joint4 x T Junction
และนำวัสดุรองรับออกด้วยคีมและกระดาษทรายเมื่อจำเป็น
การวางแผนล่วงหน้าสำหรับการต่อเติมหลังคา
ข้อมูลนี้ใช้สำหรับสแกนเนอร์รุ่นพื้นฐานที่สุดที่ใช้งานได้ ผลิตแบบจำลองที่เหมาะสมสำหรับการทำหุ่นจำลองของช่างตัดเย็บเสื้อผ้า หรือสำหรับการพิมพ์ 3 มิติบนศีรษะ (ซอฟต์แวร์ Autodesk Remake™ จะเติมลงในกระหม่อมของศีรษะเมื่อมีช่องว่าง) กล้องเพิ่มเติมในชั้นพิเศษหรือเหนือศีรษะบนคานหลังคา จะช่วยให้สแกนทั้งตัวได้ ดังนั้นเพื่อให้ง่ายต่อการอัพเกรดเครื่องสแกน ชั้นบนสุดของเสาตั้งตรงมีข้อต่อแบบไขว้เข้าที่ และเสาต่อแบบสั้นที่มีฝาปิดท้าย สามารถดาวน์โหลดคอนเนคเตอร์ 3 มิติสำหรับติดเสาหลังคาพร้อมข้อต่ออื่นๆ ได้ ชัค ซอมเมอร์วิลล์ ได้สร้างดาว 6 แฉก ซึ่งสามารถปรับขนาดเพื่อใช้เชื่อมกับเสาที่ด้านบนได้
ขั้นตอนที่ 4: การเชื่อมต่อและทดสอบ Raspberry Pis



ในขั้นตอนนี้ เราเตอร์จะต้องเปิดและเชื่อมต่อกับอินเทอร์เน็ต
การเชื่อมต่อคอมพิวเตอร์กับเซิร์ฟเวอร์
เชื่อมต่อคอมพิวเตอร์กับ wifi ชื่อ 3DCamera Open Terminal เมื่อได้รับแจ้ง ให้พิมพ์ 3Dcamera แล้วกด Enter ที่พรอมต์ถัดไป ให้พิมพ์ 3Dcamera-start จากนั้นกด Enter Open a Web Browser แล้วพิมพ์ https://localhost:8080/ ในแถบที่อยู่เพื่อเปิดแดชบอร์ด
ทดสอบ Raspberry Pis
ใช้สายกล้องเชื่อมต่อกล้องกับ Raspberry Pi เชื่อมต่อ Raspberry Pi กับแหล่งพลังงาน 5V (เช่น คอมพิวเตอร์) โดยใช้สาย micro USB หลังจากนั้นไม่กี่นาที Raspberry Pi ควรเชื่อมต่อกับระบบและปรากฏบนแดชบอร์ดด้วยชื่อตัวละคร Marvel ที่กำหนดโดยอัตโนมัติ คลิก 'ถ่ายภาพ' เพื่อ ทดสอบว่า Raspberry Pi ใช้งานได้หรือไม่ คอลัมน์สถานะบนแดชบอร์ดควรระบุเวลาที่ถ่ายและส่งรูปภาพ จากนั้นรูปภาพควรปรากฏที่ด้านบนของแดชบอร์ด หากไม่ได้ผล ให้ตรวจสอบว่ากล้องเชื่อมต่ออย่างถูกต้องและไฟสีเขียวติดที่ Pi แล้วลองอีกครั้ง
ภาพถ่ายจะถูกบันทึกโดยอัตโนมัติในโฟลเดอร์ชื่อ 'รูปภาพ' ซึ่งอยู่ในโฟลเดอร์ 3dCameraServer ที่ตั้งค่าไว้ในขั้นตอนก่อนหน้า
การประกอบเคส Raspberry Pi
เราติดกล่องกระดาษแข็ง Pi 5 ชั้นเข้าด้วยกัน ใส่ Raspberry Pi ด้วยเลเยอร์ 2 พับกล้องเข้าที่บนเลเยอร์ 3 ซึ่งยึดไว้กับเลเยอร์ 4 แล้วดันเลนส์ผ่านไปยังเลเยอร์ 5 ซ้ำแล้วซ้ำอีก กล้องทั้งหมด
การติดฉลาก Raspberry Pis
จากแดชบอร์ด เราแทนที่ชื่อตัวละคร Marvel ที่กำหนดให้กับ Pi แต่ละตัว โดยพิมพ์ตัวเลขในช่องข้อความแล้วกด Enter
การเขียนหมายเลขบนเคสของ Pi แต่ละตัวนั้นมีประโยชน์สำหรับการแก้ปัญหา
ทำซ้ำขั้นตอนนี้สำหรับ Raspberry Pi แต่ละตัวโดยกำหนดหมายเลขให้แต่ละตัว
ขั้นตอนที่ 5: เตรียมโครงสร้างและวงจรไฟฟ้า



การตระเตรียม
หลอดกระดาษแข็งถูกตัดและเตรียมความยาวดังต่อไปนี้:
ท่อ 6 x 80 ซม. สำหรับฐานของเสาที่มีรู 1.2 ซม. ขึ้นจากปลายด้านหนึ่ง 2 ซม
ท่อขนาด 6 x 40 ซม. สำหรับเสากลาง
ท่อ 6 x 10 ซม. สำหรับส่วนบนของเสา มีฝาปิดที่ปลายด้านหนึ่ง
ท่อขนาด 10 x 125 ซม. สำหรับแท่งแนวนอนที่มีรูตรงกลาง 0.5 ซม.
หลอดขนาด 2 x 125 ซม. สำหรับตั้งอิสระพร้อม Velcro ที่ Raspberry Pis และแบตเตอรี่จะไป
การเดินสายไฟ
คำเตือน: โปรดอย่าพยายามใช้ไฟฟ้าเว้นแต่คุณจะมีคุณสมบัติที่จะทำเช่นนั้น เราไม่ได้ให้รายละเอียดทั้งหมดเกี่ยวกับการเดินสายเนื่องจากมีวัตถุประสงค์เพื่อเป็นตัวอย่างวิธีที่เราทำสิ่งนี้ ไม่ใช่เป็นคำแนะนำในการปฏิบัติตาม ข้อผิดพลาดอาจเผาราสเบอร์รี่ pi ทำให้เกิดไฟไหม้หรือไฟฟ้าช็อตใครบางคน!
เคล็ดลับ: เราพบว่ากล้องที่อยู่ไกลออกไปสุดสายไม่ทำงานเมื่อเราต่อสายโซ่เดซี่เข้าด้วยกัน ดังนั้นเราจึงเชื่อมต่อฟิวส์ 3 ตัวกับ 3 วงจรแยกจากแหล่งจ่ายไฟ 12V โดยมีตัวควบคุม 4 x 5V จากแต่ละตัว แต่ละตัวสามารถให้พลังงานสูงถึง 3 raspberry pi zero นั่นหมายความว่าเรามีสายไฟ 2 เส้นที่แต่ละขั้วสามารถต่อได้ 6 เส้นสำหรับกล้อง เราต้องการเพียง 4 สำหรับศีรษะและไหล่ แต่การมีความจุพิเศษในการเพิ่มกล้องเพื่อวัตถุประสงค์อื่นก็มีประโยชน์
เราตัด USB ขนาดใหญ่ออกจากปลายสาย USB 22 เส้น และตัดให้สั้นลง 6 สาย เหลือประมาณ 30 ซม. จากนั้นโดยไม่สนใจสายข้อมูลใด ๆ เราแนบปลอกโลหะเข้ากับปลายสายไฟและสายกราวด์
ในการนำสายสั้นๆ เราผลักปลอกโลหะหนึ่งคู่เข้าไปในตัวเชื่อมต่อที่พิมพ์ 3 มิติ 12 x แต่ละตัว จนกระทั่งลวดออกมาที่ปลายด้านล่าง
เราใช้เทคนิคเดียวกันกับลีดที่ยาวกว่า โดยดันปลอกโลหะหนึ่งคู่ผ่านรูที่อยู่ตรงกลางของแถบแนวนอนแต่ละอันจนกระทั่งปรากฏที่ปลายท่อ
การทำและเดินสายไฟฐาน
เราตัดวงแหวน 16 วงเพื่อให้พอดีกับรูตรงกลางของถังเบียร์แบบใช้แล้วทิ้ง 8 ถัง โดยมีรูขนาด 3.2 ซม. ตรงกลางของแต่ละถัง ผับในพื้นที่ของเรายินดีที่จะมอบถังเหล่านี้และส่วนที่เป็นวงกลมก็มีประโยชน์สำหรับโครงการต่างๆ ฝามักจะถูกโยนทิ้งไป แต่พวกมันทำให้มีความมั่นคงมาก
เราติดวงแหวนที่ด้านบนและด้านล่างของส่วนสกรูที่อยู่ตรงกลางของฝาถังเบียร์ ทำซ้ำด้วยฝาที่สอง จากนั้นเรายืนเสาขนาด 125 ซม. ในแต่ละเสาและติดกล้องไว้ใกล้ยอดเสาแต่ละอันด้วยVelcro®
และด้านล่างอีก 40 ซม. เราเสียบชุดแบตเตอรี่ USB กับกล้องแต่ละตัวและต่อแบตเตอรี่เข้ากับเสาด้วย Velcro® ในจุดที่ตะกั่วไปถึง
ฐานโพสต์
สำหรับฝาปิดอีก 6 อัน เรานำวงแหวนไม้อัด 2 อันสำหรับแต่ละอันแล้วติดกาวร้อนเข้าที่ ด้านบนและด้านล่างของส่วนประกอบทั้งหมด ในช่องว่างระหว่างวงแหวนของแต่ละตัวมีตัวควบคุม 2 x 5V สายเคเบิลและตัวเชื่อมต่อ ซึ่งเราติดสายเคเบิล 2 x 80 ซม. และเสียบสายเคเบิลทั้งสองผ่านรู 1.2 ซม. และขึ้นไปบนท่อ ส่วนประกอบทั้งหมดพอดีกับเสาฐานที่เราตั้งไว้ตรงกลาง
พวกเขาอาจจะดูดีกว่าทาสี!
ขั้นตอนที่ 6: สร้างโครงสร้างและวงจรไฟฟ้า



เราจัดท่อแนวนอน 5 อันบนพื้นเพื่อทำเครื่องหมาย 5 ด้านของรูปหกเหลี่ยมและตั้งเสาฐานที่ทางแยกแต่ละทาง
จากนั้นเราก็สร้างเฟรมสำหรับกล้องโดยติดท่อกระดาษแข็งเข้ากับขั้วต่อที่พิมพ์ 3 มิติ ร้อยสายไฟที่ยื่นออกมา โดยติดปลอกโลหะ ผ่านเสาไปยังเสาฐาน และติดขั้วต่อสายคันโยกที่ด้านบนของเสาฐานแต่ละอันก่อนยึด ส่วนของเฟรมเข้าที่
ต่อไป เราเชื่อมต่อกล้องเข้ากับไมโคร USB ครึ่งทางตามแถบแนวนอนแต่ละอัน กล่องกระดาษแข็ง Pi ได้รับการออกแบบมาเพื่อให้ USB ซ่อนอยู่ภายในบางส่วน และส่วนอื่น ๆ ของ USB สามารถดันเข้าไปในหลอดกระดาษแข็งได้เล็กน้อย ดังนั้นกล้องจึงวางเรียบตรงด้านบนของเสา USB ถือไว้ในตำแหน่ง
เราเชื่อมต่อกล้องเข้ากับสาย USB ที่จุดเชื่อมต่อมุม โดยใช้ Velcro แบบมีกาวในตัว เพื่อยึดกล้องให้เข้าที่
จากนั้นเราวางเสากล้องตั้งตรงโดยเว้นระยะห่างเท่ากันตลอดช่องเปิด
สุดท้าย เราได้ปรับกล้องเพื่อให้แน่ใจว่ากล้องทั้งหมดชี้ไปที่กึ่งกลาง
มีกล้องสำรองหนึ่งตัวในกรณีที่หยุดทำงาน
ขั้นตอนที่ 7: ถ่ายภาพ

หากต้องการใช้เครื่องสแกน ให้ยืนหรือนั่งในกรอบตรงกลาง
ขอให้คนอื่นกด 'ถ่ายภาพ' บนแดชบอร์ด ควรถ่ายภาพทั้งหมดในเวลาเดียวกัน แต่เนื่องจากสัญญาณถูกส่งผ่าน wifi บางครั้งอาจมีความล่าช้าเล็กน้อยในบางครั้ง ดังนั้นอยู่นิ่งๆ สักครู่จนกว่าจะส่งรูปภาพทั้งหมด
รูปภาพจะถูกบันทึกไว้ในโฟลเดอร์รูปภาพในโฟลเดอร์ 3DCameraServer
สำหรับเคล็ดลับในการถ่ายภาพให้ดูดี ดูวิดีโอนี้
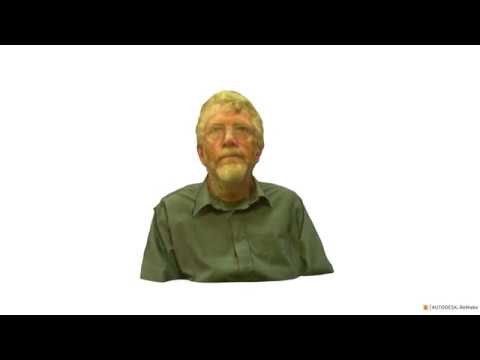
ขั้นตอนที่ 8: ประมวลผลภาพถ่ายเป็นโมเดล 3 มิติ



คำแนะนำต่อไปนี้มีไว้สำหรับ Autodesk Remake™ (เวอร์ชัน 17.25.31) เป็นผลิตภัณฑ์ freemium แต่ฉันพบว่าโหมดฟรีเพียงพอแล้ว นี่คือรายการซอฟต์แวร์เย็บรูปภาพเพิ่มเติม
การตั้งค่า
สร้างบัญชี Autodesk®
ติดตั้ง Autodesk Remake™ บนคอมพิวเตอร์พีซี
เปลี่ยนภาพถ่ายให้เป็นโมเดล 3 มิติ
ถ่ายโอนรูปภาพจากคอมพิวเตอร์ Mac ไปยังพีซี โดยใช้แท่ง USB หรืออัปโหลดรูปภาพไปยังที่เก็บข้อมูลบนคลาวด์ของ Autodesk® ที่เรียกว่า A360 Drive โดยใช้รายละเอียดการเข้าสู่ระบบบัญชี Autodesk® ของคุณ
เปิด Autodesk Remake™
คลิกที่ปุ่มกล้องภายใต้สร้าง 3D
บนหน้าจอป๊อปอัปที่ปรากฏขึ้น ให้คลิก ออนไลน์ (เว้นแต่คุณมีคอมพิวเตอร์ที่มีประสิทธิภาพซึ่งตรงตามข้อกำหนดขั้นต่ำในการประมวลผลแบบออฟไลน์)
ในหน้าจอป๊อปอัปถัดไป ให้เลือก Select photos from: Local Drive หากคุณโอนภาพถ่ายไปยังพีซีด้วย USB หรือคลิก A360 Drive หากคุณได้อัปโหลดภาพถ่าย
เลือกรูปภาพแล้วคลิกเปิด
เมื่อรูปภาพทั้งหมดปรากฏบนหน้าจอแล้ว ให้คลิกสร้างแบบจำลอง
ในเมนูตัวเลือกที่ปรากฏขึ้น ให้พิมพ์ชื่อในกล่องข้อความ เลือกคุณภาพ: มาตรฐาน ครอบตัดอัตโนมัติ: ปิด และพื้นผิวอัจฉริยะ: ปิด (หรือลองใช้การตั้งค่าเหล่านี้)
กำลังประมวลผล
หน้าจอจะกลับไปที่แดชบอร์ด Remake™ และจะมีกล่องแสดงความคืบหน้าของโมเดลของคุณภายใต้ My Cloud Drive จากประสบการณ์ของเรา การประมวลผลใช้เวลาประมาณ 10 นาที แต่ดูเหมือนว่าหยุดตอบสนองแล้วเพราะเปอร์เซ็นต์จะหยุดเพิ่มขึ้น หลังจากนั้นครู่หนึ่ง ตัวเลขก็จะเพิ่มขึ้นอย่างกะทันหัน คุณจะได้รับอีเมลจาก Autodesk® เมื่อการประมวลผลเสร็จสิ้น
เมื่อกล่องระบุว่า Ready to Download ให้วางเมาส์เหนือกล่องและลูกศรดาวน์โหลดสีน้ำเงินจะปรากฏขึ้น คลิกที่ลูกศรสีน้ำเงินและเลือกตำแหน่งที่จะบันทึกโมเดล
จากนั้นโมเดลจะดาวน์โหลดและปรากฏในส่วน My Computer ของแดชบอร์ด Remake® คลิกเพื่อเปิด
หลังการประมวลผล
ใช้เครื่องมือนำทางที่ด้านล่างของหน้าจอเพื่อค้นหาแบบจำลองร่างกายของคุณ
ใช้เครื่องมือการเลือกเพื่อลบส่วนที่ไม่ต้องการของโมเดล โดยเลือกชิ้นส่วนแล้วกด Delete
เมื่อคุณลบชิ้นส่วน วงกลมสีน้ำเงินที่ฐานของโมเดลจะเล็กลง หากวงกลมมีขนาดใหญ่กว่าเส้นรอบวงรอบโมเดล แสดงว่ายังมีส่วนที่ต้องถูกลบ
หากโมเดลกลับด้าน ให้ไปที่แท็บ Model Settings ทางด้านซ้ายของหน้าจอ และทำตามการตั้งค่าใน Set Scene Upright
หากต้องการสร้างพื้นผิวเรียบสำหรับแบบจำลองของคุณ ให้ไปที่แก้ไข - แบ่งส่วน & เติม
หากต้องการตรวจสอบรูและการซ่อมแซม ให้ไปที่แท็บวิเคราะห์แล้วคลิกตรวจหาและแก้ไขปัญหาแบบจำลอง
ประหยัด
หากต้องการบันทึกโมเดล ให้ไปที่ ส่งออก - ส่งออกโมเดล
หากต้องการสร้างวิดีโอการหมุนโมเดลของคุณ ให้ไปที่ ส่งออก - ส่งออกวิดีโอ
แนะนำ:
LED Cylon Scooter - 80s Larson Scanner: 5 ขั้นตอน (พร้อมรูปภาพ)
")
LED Cylon Scooter - 80s Larson Scanner: โปรเจ็กต์นี้เป็นการอัปเกรดยุค 80 เป็นสกู๊ตเตอร์ยุค 80 มาก ฉันกำลังวางแถบไฟ LED ไว้ที่กระจังหน้าของ Honda Elite ของแฟนหนุ่ม Smokey เพื่อสร้างเอฟเฟกต์แอนิเมชั่นเครื่องสแกนลาร์สันในขณะที่สอนวิธีการทำ ประสาน วงจรและรหัสถูกรีมิกซ์จาก
IPhone Scanner: 3 ขั้นตอน (พร้อมรูปภาพ)
")
IPhone Scanner: ฉันจดบันทึกจำนวนมากและจำเป็นต้องสแกนอย่างรวดเร็วเพื่อให้คุณสามารถปรึกษาออนไลน์ได้ เครื่องสแกนใด ๆ ที่ช้าเกินไปที่จะแปลงเป็นดิจิทัลหลายร้อยหน้าของโมลสกินของฉัน การถ่ายภาพที่ดีเป็นทางออกที่ดี ฉันคิดว่าฉันจะใช้ iPhone เพื่อจุดประสงค์นี้
Raspberry Pi Laser Scanner: 9 ขั้นตอน (พร้อมรูปภาพ)
")
Raspberry Pi Laser Scanner: Laser Scanner เป็นอุปกรณ์ระบบฝังตัวของ Raspberry Pi ที่สามารถแปลงวัตถุให้เป็นไฟล์ .obj mesh เพื่อทำสำเนาโดยใช้การพิมพ์ 3 มิติ อุปกรณ์นี้ทำได้โดยใช้เลเซอร์เส้นและ PiCam ในตัวเพื่อดำเนินการคอมพิวเตอร์วิทัศน์ เลเซอร์
Ciclop 3d Scanner My Way ทีละขั้นตอน: 16 ขั้นตอน (พร้อมรูปภาพ)
")
Ciclop 3d Scanner My Way ทีละขั้นตอน: สวัสดีทุกคน ฉันจะมาทำความรู้จักกับเครื่องสแกน Ciclop 3D ที่มีชื่อเสียง ทุกขั้นตอนที่อธิบายอย่างดีเกี่ยวกับโปรเจ็กต์ดั้งเดิมนั้นไม่มีอยู่จริง ฉันได้แก้ไขบางอย่างเพื่อทำให้กระบวนการง่ายขึ้นก่อน ฉันพิมพ์ฐานและกว่าฉันจะปรับ PCB ใหม่ แต่ไปต่อ
Rock Buggy Body สำหรับ RedCat Gen7: 9 ขั้นตอน (พร้อมรูปภาพ)
")
Rock Buggy Body สำหรับ RedCat Gen7: อุปกรณ์เสริมสำหรับการพิมพ์ Inspiration3D และแม้แต่ร่างกายทั้งหมดก็เป็นที่นิยมอย่างมากในหมู่ชุมชน RC โดยเฉพาะอย่างยิ่งในประเภทของ RC Crawlers ตัวฉันและคนอื่นๆ ได้เปิดตัวโครงการฟรีทุกประเภท แต่สิ่งที่ไม่เคยได้ยินมาก่อนคือให้ผู้ผลิตปล่อย